«La electrónica de potencia implica el estudio de circuitos electrónicos destinados a controlar el flujo de energía eléctrica». Estos circuitos manejan un flujo de energía a niveles mucho más altos que los niveles manejados por dispositivos de uso común.

Introducción
En términos generales, la tarea de la electrónica de potencia es procesar y controlar el flujo de energía eléctrica mediante el suministro de voltajes y corrientes en una forma que sea ideal para las cargas de los usuarios.
La figura 1-1 muestra un sistema electrónico de potencia en forma de diagrama de bloques. La entrada de energía a este procesador de energía generalmente es (pero no siempre) de la compañía eléctrica a una frecuencia de línea de 60 o 50 Hz, monofásica o trifásica. El ángulo de fase entre la tensión de entrada y la corriente depende de la topología y el control del procesador de potencia. La salida procesada (voltaje, corriente, frecuencia y número de fases) es la requerida por la carga.

Si la salida del procesador de energía puede considerarse como una fuente de voltaje, la corriente de salida y la relación de ángulo de fase entre el voltaje de salida y la corriente dependen de la característica de la carga. Normalmente, un controlador de realimentación compara la salida de la unidad del procesador de potencia con un valor deseado (o una referencia), y luego dicho controlador busca minimizar el error entre los dos valores.
El controlador en el diagrama de bloques de la Fig. 1-1 consiste en circuitos integrados lineales y / o procesadores de señales digitales. Los avances en la tecnología de fabricación de semiconductores han hecho posible mejorar significativamente las capacidades de manejo de voltaje y corriente y las velocidades de conmutación de los dispositivos semiconductores de potencia, que conforman la unidad del procesador de potencia de la figura 1-1.
Marco conceptual de la Electrónica de Potencia
Se ha dicho que las personas no usan electricidad, sino que usan la comunicación, la luz, el trabajo mecánico, el entretenimiento y todos los beneficios tangibles de la energía y la electrónica. En este sentido, la ingeniería eléctrica es una disciplina muy involucrada en la conversión de energía e información. En el mundo general de la ingeniería electrónica, el diseño y el uso de los ingenieros de circuitos están destinados a convertir información, y la energía es simplemente una consideración secundaria en la mayoría de los casos.
¿Qué pasa con la conversión y control de la energía eléctrica? Las fuentes de energía eléctrica son variadas y de muchos tipos. Es natural entonces considerar el cómo los circuitos y sistemas electrónicos pueden aplicarse a los desafíos de la conversión y gestión de la energía. Este es el marco de la electrónica de potencia, una disciplina que se define en términos de conversión de energía eléctrica, aplicaciones y dispositivos electrónicos.
Power Electronics Vs Linear Electronics
En cualquier proceso de conversión de energía, como el que se muestra en el diagrama de bloques de la Figura 1-1, una pequeña pérdida de energía y, por lo tanto, una alta eficiencia energética es importante por dos razones: el costo de la energía desperdiciada y la dificultad para eliminar el calor que se genera debido a la energía disipada.
Otras consideraciones importantes son la reducción de tamaño, peso y costo. Los objetivos anteriores en la mayoría de los sistemas no se pueden cumplir con la electrónica lineal en la que los dispositivos semiconductores funcionan en su región lineal (activa) y se utiliza un transformador de frecuencia de línea para el aislamiento eléctrico. Como ejemplo, considere la fuente de alimentación de corriente continua (dc) de la Figura 1-2a para proporcionar una tensión de salida regulada V, a una carga.


La entrada al sistema o red de suministro (Utility Supply) puede ser típicamente de 120 o 240 V y la tensión de salida puede ser, por ejemplo, de 5 V. La salida debe estar aislada eléctricamente de la entrada de la utilidad. En la fuente de alimentación lineal, se utiliza un transformador de frecuencia de línea para proporcionar aislamiento eléctrico y reducir el voltaje de la línea. El rectificador convierte la salida de corriente alterna (CA) del devanado de baja tensión del transformador en CC. El condensador del filtro reduce la ondulación en la tensión de corriente continua vd. La Figura 1-2b muestra la forma de onda vd, que depende de la magnitud del voltaje de la red de suministro (normalmente en un rango del 10% alrededor de su valor nominal).

La relación de los giros del transformador debe elegirse de modo que el mínimo del voltaje de entrada v sea mayor que el deseado V. Para el rango de las formas de onda del voltaje de entrada que se muestra en la Fig. 1-2b, el transistor se controla para absorber la diferencia de voltaje entre v y V, proporcionando así una salida regulada. El transistor opera en su región activa como una resistencia ajustable, lo que resulta en una baja eficiencia energética. El transformador de frecuencia de línea es relativamente grande y pesado.
En la electrónica de potencia, la regulación de voltaje anterior y el aislamiento eléctrico se logran, por ejemplo, por medio de un circuito que se muestra en la Fig. 1-3a.


En este sistema, la entrada proveniente de la red de suministro se rectifica en un voltaje de corriente continua, sin un transformador de frecuencia de línea. Al operar el transistor como un interruptor (en un modo de conmutación, totalmente activado o totalmente desactivado – 0n/Off) a alguna frecuencia de conmutación alta f, por ejemplo a 300 kHz, la tensión de corriente continua vd se convierte en una tensión alterna a la frecuencia de conmutación. Esto permite utilizar un transformador de alta frecuencia para reducir el voltaje y proporcionar el aislamiento eléctrico.
Para simplificar este circuito para el análisis, omitiremos el transformador y supondremos como entrada una fuente de voltaje DC de valor vd, lo que dará como resultado un circuito equivalente que se muestra en la Fig. 1-3b.


La combinación de diodo de transistor se puede representar mediante un hipotético interruptor de dos posiciones que se muestra en la Fig. 1-4a.. (provided iL(t) > 0).


El interruptor está en la posición a durante el intervalo t-on cuando el transistor está encendido, y en la posición b cuando el transistor está apagado durante la t-off. Como consecuencia, Voi es igual a Vd y 0 durante t-on y t-off, respectivamente, como se muestra en la Fig. 1-4b.

Definamos:

where Voi is the average (dc) value of Voi-t, and the instantaneous ripple voltage V-ripple, which has a zero average value, is shown in Fig. 1-4c.
donde Voi es el valor promedio (dc) de Voi-t, y el rizado V de voltaje de rizado instantáneo, que tiene un valor promedio de cero, se muestra en la Fig. 1-4c

Los elementos L-C forman un filtro de pasabajo que reduce la ondulación en el voltaje de salida y pasa el promedio del voltaje de entrada, de modo que:

donde Vo, es el voltaje de salida promedio. A partir de las formas de onda repetitivas en la figura 1-4b, es fácil ver que:

A medida que la tensión de entrada Vd cambia con el tiempo, la ec. 1-3 muestra que es posible regular Vo, en su valor deseado mediante el control de la relación t-on / Ts que se denomina la relación de trabajo D (Duty Ratio) del interruptor de transistor. Por lo general, Ts (= l / fs) se mantiene constante y se ajusta t-on.
Hay varias características que vale la pena destacar. Dado que el transistor funciona como un interruptor, completamente encendido o apagado, la pérdida de energía se minimiza. Por supuesto, hay una pérdida de energía cada vez que el transistor cambia de un estado a otro a través de su región activa. Por lo tanto, la pérdida de potencia debida a las conmutaciones es linealmente proporcional a la frecuencia de conmutación. Esta pérdida de potencia de conmutación suele ser mucho menor que la pérdida de potencia en las fuentes de alimentación reguladas lineales.
En altas frecuencias de conmutación, el transformador y los componentes del filtro son muy pequeños en peso y tamaño en comparación con los componentes de frecuencia de línea.
Aplicaciones de la Electrónica de Potencia
La mayor demanda en el mercado de electrónica de potencia se debe a varios factores que se explican a continuación:
- Fuentes de alimentación de modo conmutado (dc) y fuentes de alimentación ininterrumpibles. Los avances en la tecnología de fabricación de microelectrónica han llevado al desarrollo de computadoras, equipos de comunicación y productos electrónicos de consumo, todos los cuales requieren fuentes de alimentación de CC reguladas y, a menudo, fuentes de alimentación ininterrumpidas.
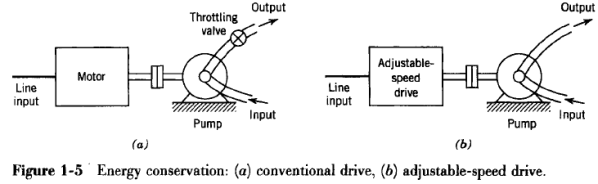
- Conservación de energía. El aumento de los costos de energía y la preocupación por el medio ambiente se han combinado para hacer de la conservación de la energía una prioridad. Una de estas aplicaciones de la electrónica de potencia es el funcionamiento de lámparas fluorescentes a altas frecuencias (por ejemplo, por encima de 20 kHz) para una mayor eficiencia. Otra oportunidad para la gran conservación de energía es en los sistemas de bomba y compresor impulsados por motor. En un sistema de bomba convencional que se muestra en la Fig. 1-5a, la bomba funciona esencialmente a una velocidad constante, y el caudal de la bomba se controla ajustando la posición de la válvula de estrangulamiento. Este procedimiento da como resultado una pérdida de potencia significativa a través de la válvula a velocidades de flujo reducidas, donde la energía extraída de la empresa de servicios públicos permanece esencialmente igual a la tasa de flujo total. Esta pérdida de potencia se elimina en el sistema de la figura 1-56, donde un motor de velocidad ajustable ajusta la velocidad de la bomba a un nivel apropiado para entregar el caudal deseado.
- Process control and factory automation. Existe una creciente demanda por el rendimiento mejorado que ofrecen las bombas y compresores de velocidad ajustable en el control de procesos. Los robots en fábricas automatizadas son alimentados por servomotores eléctricos (velocidad y posición ajustables). Cabe señalar que la disponibilidad de computadoras de proceso es un factor importante para hacer que el control de procesos y la automatización de fábricas sean factibles.
- Transporte. En muchos países, los trenes eléctricos han estado en uso generalizado durante mucho tiempo. Ahora, también existe la posibilidad de usar vehículos eléctricos en grandes áreas metropolitanas para reducir el smog y la contaminación. Los vehículos eléctricos también requerirían cargadores de baterías que utilizan electrónica de potencia.
- Electro-technical applications. Estos incluyen equipos para soldadura, galvanoplastia y calentamiento por inducción.
- Utility-related applications. Una de estas aplicaciones es la transmisión de energía a través de líneas de CC de alto voltaje (HVDC). En el extremo de envío de la línea de transmisión, los voltajes y corrientes de frecuencia de línea se convierten a dc. Este dc se convierte de nuevo en la CA de frecuencia de línea en el extremo receptor de la línea. La electrónica de potencia también está comenzando a desempeñar un papel importante a medida que las empresas eléctricas intentan utilizar la red de transmisión existente a una capacidad mayor. Potencialmente, una gran aplicación se encuentra en la interconexión de sistemas fotovoltaicos y eólicos a la red eléctrica.
Clasificación de Procesadores de potencia y Convertidores
Para un estudio sistemático de la electrónica de potencia, es útil categorizar los procesadores de potencia, que se muestran en el diagrama de bloques de la Fig. 1-1, en términos de su forma o frecuencia de entrada y salida.

En la mayoría de los sistemas electrónicos de potencia, la entrada proviene de la red eléctrica. Dependiendo de la aplicación, la salida a la carga puede tener cualquiera de los siguientes formularios:
- DC
- magnitud regulada (constante)
- magnitud ajustable
- AC
- frecuencia constante, magnitud ajustable
- frecuencia constante y magnitud ajustable
La red eléctrica y la carga de CA, independientes entre sí, pueden ser monofásicas o trifásicas. El flujo de potencia es generalmente desde la entrada de la red a la carga de salida.
Los procesadores de potencia de la Fig. 1-1 generalmente consisten en más de una etapa de conversión de potencia (como se muestra en la Fig. 1-6), donde el funcionamiento de estas etapas se desacopla de forma instantánea por medio de elementos de almacenamiento de energía tales como condensadores y inductores.

Por lo tanto, la entrada de potencia instantánea no tiene que ser igual a la salida de potencia instantánea. Nos referiremos a cada etapa de conversión de potencia como un convertidor. Por lo tanto, un convertidor es un módulo básico (bloque de construcción) de sistemas electrónicos de potencia. Utiliza dispositivos semiconductores de potencia controlados por electrónica de señal (circuitos integrados) y, posiblemente, elementos de almacenamiento de energía, como inductores y condensadores. Según el formulario (frecuencia) en los dos lados, los convertidores se pueden dividir en la siguiente categoría amplia:
- ac to dc
- dc to ac
- dc to dc
- ac to ac
We will use converter as a generic term to refer to a single power conversion stage that may perform any of the functions listed above. To be more specific, in ac-to-dc and dc-to-ac conversion, rectifier refers to a converter when the average power flow is from the ac to the dc side. Inverter refers to the converter when the average power flow is from the dc to the ac side.
Further insight can be gained by classifying converters according to how the devices within the converter are switched. There are three possibilities:
- Line frequency (naturally cornmutated) converters, where the utility line voltages present at one side of the converter facilitate the turn-off of the power semiconductor devices. Similarly, the devices are turned on, phase locked to the line voltage waveform. Therefore, the devices switch on and off at the line frequency of 50 or 60 Hz.
- Switching (forced-commutated) converters, where the controllable switches in the converter are turned on and off at frequencies that are high compared to the line frequency.
- Resonant and quasi-resonant converters, where the controllable switches turn on and/or turn off at zero voltage and/or zero current.
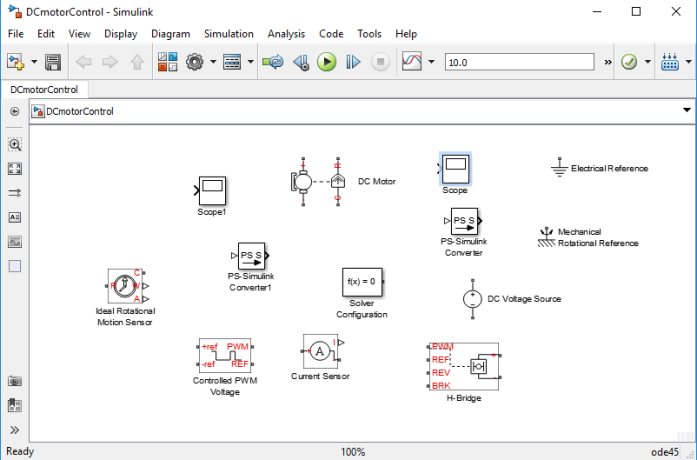
Control de Motor DC
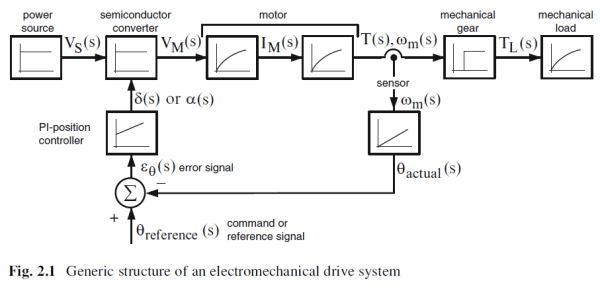
Brevemente, un sistema para accionar un motor (drive) tiene un diagrama de bloques semejante al mostrado en la Figura 27.1. Las cargas pueden ser un transportador, un sistema de tracción, los cilindros de una unidad de molino, el compresor de un aire acondicionado, el sistema de propulsión de un barco, la válvula de control de una caldera, un brazo robótico, y así sucesivamente.

El bloque descrito como “Power Electronic Converter” en el diagrama de la Figura 27.1, en el caso de un control PWM, puede usar diodos, MOSFETs, GTOs or IGBTs. Los sistemas de servoaccionamiento (Servo drives) normalmente utilizan el convertidor de cuatro cuadrantes de la Figura 27.7, que permite accionamientos (drives) bidireccionales y capacidades de frenado regenerativo.

PWM es una técnica para el control efectivo del voltaje de armadura en un motor DC, utilizando solamente un switch ON-OFF. La Figura 2.3.3 ilustra la señal de salida de un equipo PWM:
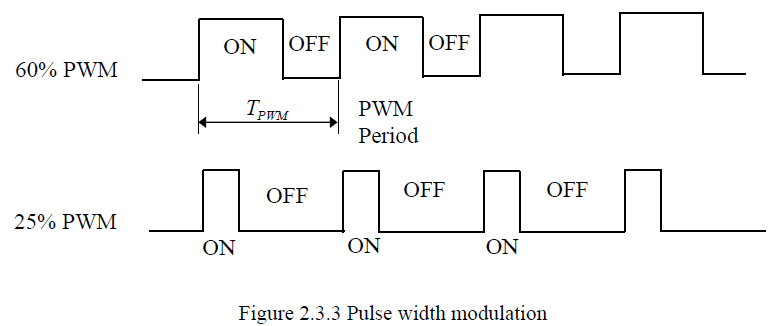
El PWM varía la relación entre la duración del estado ON con respecto a la duración del estado OFF. Un solo ciclo de estados ON y OFF representa el periodo del PWM, mientras que el porcentaje del estado ON con respecto al periodo del PWM es denominado “Duty Rate” (ritmo de trabajo). La primera señal PWM mostrada en la Figura 2.3.3, está a 60% de trabajo, mientras la segunda lo está a 25%. Si la fuente de voltaje que alimenta el sistema es V=10 volts, el voltaje promedio realmente transmitido al motor DC es de 6 volts en el primer caso y de 2.5 volts en el segundo. El periodo del PWM es establecido de tal manera que sea mucho más corto que la constante de tiempo asociada al movimiento mecánico. La frecuencia del PWM está usualmente entre los 2 y los 20 KHz, mientras que un ancho de banda típico del sistema de control del motor es de 100 Hz. Por lo tanto, la conmutación discreta no influye sustancialmente al movimiento mecánico en la mayoría de los casos.
Si la constante de tiempo Te es mucho mayor que el período de PWM, la corriente real que fluye hacia la armadura del motor es una curva suave, como se ilustra en la Figura 2.3.4:

SIGUIENTE:
Fuentes:
- Power Electronic – Mohan
- Libro Rashid – Power Electronic Handbook
Lunes 15 de noviembre, 11:08 am – Caracas, Quito, Guayaquil.
Escrito por Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer –
Se hacen trabajos, se resuelven ejercicios!!
WhatsApp: +34633129287 Atención Inmediata!!
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV Caracas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34633129287
Caracas, Quito, Guayaquil, Cuenca.
WhatsApp: +34633129287
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com