
Bode plots are a convenient presentation of the frequency response data for
the purpose of estimating the transfer function. These plots allow parts of the
transfer function to be determined and extracted, leading the way to further
refinements to find the remaining parts of the transfer function.
Although experience and intuition are invaluable in the process, the following steps are still offered as a guideline:
1. Look at the Bode magnitude and phase plots and estimate the pole-zero configuration of the system. Look at the initial slope on the magnitude plot to determine system type. Look at phase excursions to get an idea of the difference between the number of poles and the number of zeros.
2. See if portions of the magnitude and phase curves represent obvious first- or second-order pole or zero frequency response plots.
3. See if there is any telltale peaking or depressions in the magnitude response plot that indicate an underdamped second-order pole or zero, respectively.
4. If any pole or zero responses can be identified, overlay appropriate ±20 or ±40 dB/decade lines on the magnitude curve or ±45°/decade lines on the phase curve and estimate the break frequencies.For second-order poles or zeros, estimate the damping ratio and natural frequency from the standard curves.
5. Form a transfer function of unity gain using the poles and zeros found. Obtain the frequency response of this transfer function and subtract this response from the previous frequency response (Franklin, 1991). You now have a frequency response of reduced complexity from which to begin the process again to extract more of the system’s poles and zeros. A computer program such as MATLAB is of invaluable help for this step.
Example
Find the transfer function of the subsystem whose Bode plots are shown in Figure 1:

Figure 1
Let us first extract the underdamped poles that we suspect, based on the peaking in the magnitude curve.We estimate the natural frequency to be near the peak frequency, or approximately 5 rad/s. From Figure 1, we see a peak of about 6.5 dB, which translates into a damping ratio of about ζ=0,24. The unity gain second-order function is thus:

The frequency response plot of this function is made and subtracted from the previous
Bode plots to yield the response in Figure 2:
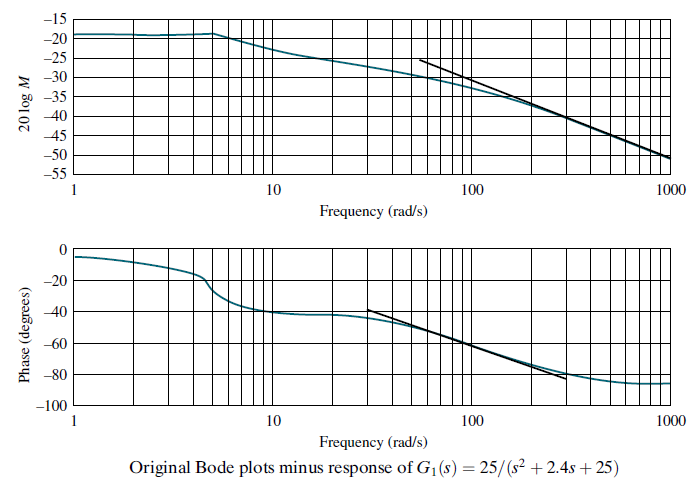
Figure 2
Overlaying a -20 dB/decade line on the magnitude response and a -45°/decade line on the phase response, we detect a final pole. From the phase response, we estimate the break frequency at 90 rad/s. Subtracting the response of G2(s)=90/(s+90) from the previous response yields the response in Figure 3.
Figure 3
Figure 3 has a magnitude and phase curve similar to that generated by a lag function. We draw a -20 dB/decade line and fit it to the curves. The break frequencies are read from the figure as 9 and 30 rad/s. A unity gain transfer function containing a pole at -9 and a zero at -30 is G3(s)=0.3(s+30)/(s+9). Upon subtraction of G1(s)G2(s)G3(s), we find the magnitude frequency response flat ±1 dB and the phase response flat at -3± 5°. We thus conclude that we are finished extracting dynamic transfer functions as:

It is interesting to note that the original curve was obtained from the function:

Sources:
- Modern_Control_Engineering, Ogata 4t
- Control Systems Engineering, Nise
- Sistemas de Control Automatico, Kuo
Literature review by:
Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
Resolving problems!!
WhatsApp: +34633129287 Immediate attention!!
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34633129287
Caracas, Quito, Guayaquil, Cuenca.
WhatsApp: +34633129287 +593998524011
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com


 ,
, ,
, .
.





 Or well:
Or well:






 is obtained as follows. Given that:
is obtained as follows. Given that:





