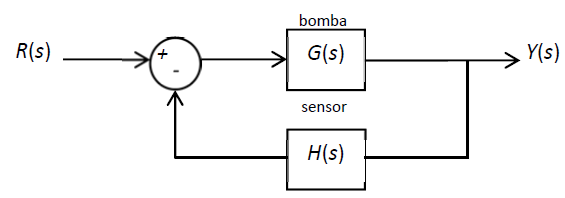
En numerosos casos, los sistemas de control no tienen realimentación unitaria. El recorrido de realimentación puede estar constituido por una ganancia diferente de cero, o una función de transferencia específica. Es por ello que debemos considerar el caso de un sistema de control general con realimentación no unitaria. Considere el sistema de la Figura 1:
Figura 1
La función de transferencia a lazo cerrado del sistema de la Figura 1 es:
La función de transferencia entre la señal de error e(t) y la señal de entrada r(t) es:
Dado que:
El error en estado estable ess del sistema es:
El error en estado estable ess del sistema para el escalón unitario es:
La constante de error de posición estática Kp se define utilizando la función de transferencia a lazo abierto G(s)H(s), mediante :
Por ende, el error en estado estable ess del sistema para el escalón unitario, en términos de la constante de error de posición estática Kp es:
Ejemplo
El diagrama de bloques de un sistema se muestra en la Figura 2:
Figura 2
Calcular el error del sistema en régimen permanente ante una entrada escalón unitario y el error en régimen permanente ante una entrada rampa.
Respuesta:
Para calcular el error del sistema e(∞) en régimen permanente ante una entrada escalón, utilizamos la fórmula siguiente:
Donde Kp es la constante de error de posición estática:
De donde:
Este resultado es el esperado ya que el sistema representado por la función de transferencia directa G(s) es un sistema tipo 1. Revisar clasificación de los sistemas en: Error en estado estable de un sistema de control
Para calcular el error del sistema e(∞) en régimen permanente ante una entrada rampa, utilizamos la fórmula siguiente:Donde Kv es la constante de error de velocidad estática:De donde:Te puede interesar:
Control Systems Engineering, NiseSistemas de Control Automatico Benjamin C KuoModern_Control_Engineering, Ogata 4t
Escrito por: Larry Francis Obando – Technical Specialist – Educational Content Writer.WhatsApp: +34633129287 Atención Inmediata!! Mentoring Académico / Emprendedores / EmpresarialCopywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.Contacto: España. +34 633129287Caracas, Quito, Guayaquil, JaénWhatsApp: +34633129287email: dademuchconnection@gmail.com
Dado el sistema de la siguiente figura, aplicar las siguientes señales de entrada: Escalón unitario, Rampa unitaria y Escalón de amplitud factor*2:
Se consideran las dos plantas siguientes:
Se pide: 1) Observar la respuesta temporal simulada durante 20 segundos para cada sistema y para cada entrada. 2) Obtener gráficamente el valor del error que presenta la respuesta cada sistema al cabo de 10 segundos. 3) Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
Incluir un controlador proporcional, esto es, una ganancia (bloque Gain) en el diagrama. Dar el valor 10 a la ganancia y obtener de nuevo su respuesta ante las entradas utilizadas en el apartado anterior.
De forma análoga, obtener gráficamente el valor del error que presenta la respuesta del sistema al cabo de 10 segundos. Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
El sistema con la función de transferencia 1 se prueba con dos controladores: un P con ganancia proporcional 0.7 y un PI con la misma ganancia proporcional y con ganancia integral 10. Observar la respuesta obtenida ante un escalón unitario para el sistema sin controlador, para el sistema con el controlador P y para el que tiene el PI.
Buscar una posible modificación en las ganancias de ambos controladores para mejorar la respuesta.
Respuesta:
Antes de simular la respuesta a las diferentes señales, definimos en Matlab las funciones de transferencia de cada planta mediante:
>> G1=tf([1],[1 1]);
>> G2=tf([1],[1 1 0]);
Estos comandos arrojan el siguiente resultado:
Definimos los sistemas de realimentación unitaria para cada una de las plantas:
>> sys1=feedback(G1,1);
>> sys2=feedback(G2,1);
Entrada Escalón unitario: Con la función step() simulamos la respuesta al escalón unitario de cada sistema de realimentación definido, durante 20 segundos:
>> step(sys1)
Gráfica 1
>> step(sys2)
Gráfica 2
Mediante estas gráficas podemos calcular el valor del error que presenta la respuesta de cada sistema a la entrada escalón al cabo de 10 segundos. Comenzamos con sys1:
Gráfica 3
En la gráfica 3 podemos observar que la salida del sistema de realimentación 1, el cual involucra a G1(s), a los 10 segundos es igual a 0.5. Por lo tanto el error, e1(t) de este sistema a la entrada escalón cuando t=10s, es:
También se observa en la gráfica 3 que a los 10s el sistema 1 ha alcanzado su estado estable. Esto lo podemos corroborar mediante el comando stepinfo():
Por lo que el error a la entrada escalón unitario a los 10 segundos es igual al error e1step(∞) del sistema a la entrada escalón en estado estable:
En consecuencia, se puede calcular analíticamente este error utilizando la constante de posición Kp:
El error en estado estable e1step(∞) del sistema 1 a la entrada escalón unitario es:
Aplicamos este mismo procedimiento para calcular el valor del error que presenta la respuesta del sys2 a la entrada escalón unitario al cabo de 10 segundos:
Gráfica 4
En la gráfica 4 podemos observar que la salida del sistema de realimentación 2, el cual involucra a G2(s), a los 10 segundos es igual a 1. Por lo tanto el error, e2(t) de este sistema a la entrada escalón cuando t=10s, es:
Se observa en la gráfica 4 que a los 10s el sistema 2 ha alcanzado su estado estable.
Por lo que el error a la entrada escalón unitario a los 10 segundos es igual al error e2step(∞) del sistema a la entrada escalón en estado estable:
En consecuencia, se puede calcular analíticamente este error utilizando la constante de posición Kp:
El error en estado estable e2step(∞) del sistema 2 a la entrada escalón unitario es:
Entrada Rampa unitaria:
Para evaluar la respuesta de cada sistema a la rampa unitaria debemos en primer lugar definir la función rampa unitaria mediante:
>> t=0:0.01:21;
>> x=t;
>> lsim(sys1,x,t)
Gráfica 5 (la salida del sistema 1 en azul)
>> lsim(sys2,x,t)
Gráfica 6 (la salida del sistema 2 en azul)
Aplicamos el mismo procedimiento para calcular el valor del error que presenta la respuesta del sys1 a la entrada rampa al cabo de 10 segundos:
Gráfica 7 (la salida del sistema 1 en azul)
En la gráfica 7 podemos observar que la salida del sistema de realimentación 1, a los 10 segundos es igual a 4.75. Por lo tanto el error e1(t) de este sistema a la entrada rampa cuando t=10s, es:
El error e1rampa(∞) del sistema 1 a la entrada rampa, se puede calcular analíticamente utilizando la constante de posición Kv:
El error en estado estable e1ramp(∞) del sistema 1 a la entrada rampa es:
Si vemos la gráfica 7 podemos ver que la entrada crece indefinidamente, y también crece infinitamente la separación con la salida del sistema. Por eso el error en estado estable del sistema 1 a la entrada rampa es infinito.
Para el sys2 al cabo de 10 segundos:
Gráfica 8 (la salida del sistema 2 en azul)
En la gráfica 8 podemos observar que la salida del sistema de realimentación 2, a los 10 segundos es igual a 9. Por lo tanto el error e2(t) de este sistema a la entrada rampa cuando t=10s, es:
El error e2rampa(∞) del sistema 2 a la entrada rampa, se puede calcular analíticamente utilizando la constante de posición Kv:
El error en estado estable e2ramp(∞) del sistema 2 a la entrada rampa es:
Si vemos la gráfica 8 podemos ver que ambas señales, entrada y salida, crecen en paralelo indefinidamente, con una diferencia constante de 1. En conclusión, el error en estado estable del sistema 2 a la entrada rampa es igual a 1.
Escalón de amplitud factor*2:
Utilizamos el factor=0.7
Por tanto, el escalón tendrá una amplitud de 1.4
Para evaluar la respuesta de cada sistema al escalón de amplitud 1.4 simplemente multiplicamos cada sistema por 1.4 y evaluamos la respuesta para el escalón unitario. A cada sistema nombramos 1.1 y 2.2 respectivamente. Entonces:
>> sys11= 1.4*sys1
>> sys22=1.4* sys2;
Procedemos a graficar los sistemas anteriormente definidos:
>> step(sys11)
Gráfica 9
>> step(sys22)
Gráfica 10
Aplicamos el procedimiento para calcular el valor del error que presenta la respuesta del sys1.1 a la entrada escalón de amplitud 1.4 al cabo de 10 segundos:
Gráfica 11
En la gráfica 11 podemos observar que la salida del sistema 1.1, a los 10 segundos es igual a 0.7. Por lo tanto el error, e1.1(t) de este sistema a la entrada escalón con amplitud 1.4 cuando t=10s, es:
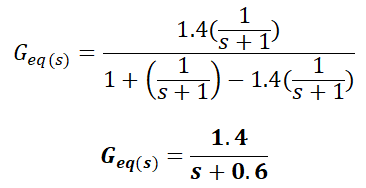
Utilizando el principio de superposición, podemos calcular el error a la entrada escalón utilizando la constante de posición Kp y sumando 0.4 a la expresión para e1.1step(∞):
Dónde:
Nota: se determinó Geq mediante la regla siguiente:
Por tanto:
Se confirma que el error en estado estable del sistema 1.1 a la entrada escalón con amplitud 1.4 es:
Aplicamos el procedimiento para calcular el valor del error que presenta la respuesta del sys2.2 a la entrada escalón al cabo de 10 segundos:
Gráfica 12
En la gráfica 12 podemos observar que la salida del sistema 2.2, a los 10 segundos es igual a 1.4. Por lo tanto el error, e2.2(t) de este sistema a la entrada escalón con amplitud 1.4 cuando t=10s, es:
Se puede calcular el error a la entrada escalón utilizando la constante de posición Kp:
Dónde:
Por tanto:
Se confirma que el error en estado estable del sistema 2.2 a la entrada escalón con amplitud 1.4 es:
2DA PARTE
Incluir un controlador proporcional, esto es, una ganancia (bloque Gain) en el diagrama. Dar el valor 10 a la ganancia y obtener de nuevo su respuesta ante las entradas utilizadas en el apartado anterior.
De forma análoga, obtener gráficamente el valor del error que presenta la respuesta del sistema al cabo de 10 segundos. Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
6. El sistema con la función de transferencia 1 se prueba con dos controladores: un P con ganancia proporcional 0.7 y un PI con la misma ganancia proporcional y con ganancia integral 10. Observar la respuesta obtenida ante un escalón unitario para el sistema sin controlador, para el sistema con el controlador P y para el que tiene el PI.
7. Buscar una posible modificación en las ganancias de ambos controladores para mejorar la respuesta.
Sea una planta cuyo comportamiento se modela como un sistema de primer orden. La respuesta de todo el sistema controlado frente a un escalón unitario es la representada en la siguiente figura:
Esta planta es controlada mediante un regulador P, cuya ganancia vale 13.37, y el sistema tiene realimentación unitaria.
Se pide determinar:
La función de transferencia de la planta.
Se sustituye el controlador proporcional por uno integral, y en el lazo de realimentación se introduce un sensor cuya ganancia estática es 1.1 y cuya constante de tiempo es 1.02 s. Determinar el máximo valor que puede tomar la ganancia del controlador para que el sistema sea estable.
Respuesta:
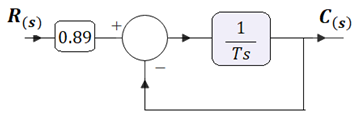
Debido a que el sistema se comporta como un sistema de primer grado, podemos suponer que la función de transferencia de dicho sistema es de la forma siguiente:
La constante de tiempo T es el tiempo en que el sistema alcanza un 63.2% de su valor final. De acuerdo con la gráfica de la respuesta del sistema a la entrada escalón unitario, este valor final es de 0.89, por lo tanto, T es el tiempo en que el sistema alcanza el valor de 0.562:
En la gráfica anterior podemos ver que el valor de 0.562 se logra aproximadamente a los 0.36 s. Entonces:
En la función de transferencia predeterminada para el sistema:
La variable a se relaciona con la constante de tiempo T de la manera siguiente:
Para encontrar la constante K debemos considerar que analíticamente la respuesta del sistema a la función escalón es como sigue:
La antitransformada de Laplace de C(s) nos permite obtener c(t):
La ecuación para c(t) nos permite ver que el valor final de la respuesta del sistema es k/a. De la gráfica podemos afirmar entonces que:
Es decir:
De esta manera podemos afirmar que la función de transferencia del sistema es:
Este resultado lo podemos corroborar con la siguiente simulación:
>> Gs=tf([2.47],[1 2.78]);
>> step(Gs)
La planta es controlada mediante un regulador P, de ganancia k1=13.37, y realimentación unitaria. Ambos componentes se pueden representar mediante el siguiente diagrama de bloque:
Es decir:
Dónde:
Entonces:De donde:
En definitiva, la función de transferencia de la planta es:
2da parte
Se sustituye el controlador proporcional por uno integral, y en el lazo de realimentación se introduce un sensor cuya ganancia estática es 1.1 y cuya constante de tiempo es 1.02 s. Determinar el máximo valor que puede tomar la ganancia del controlador para que el sistema sea estable.
Respuesta 2:
La nueva situación se representa mediante el siguiente diagrama de bloques:
Dónde:
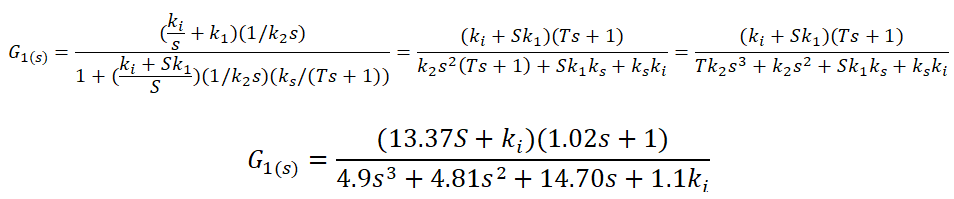
La función de transferencia del lazo realimentado es:
La función de transferencia del sistema en su totalidad es:
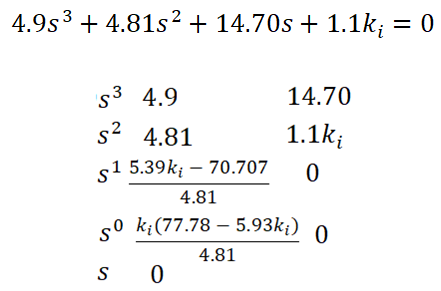
Para estudiar la estabilidad del sistema nos enfocamos en su ecuación característica para aplicar el criterio de Routh-Hurwitz:
Para lograr estabilidad deben cumplir estas dos condiciones:
Del análisis de estabilidad del sistema concluimos que el valor máximo de la constante del controlador integral para garantizar estabilidad es 13.14.
Escrito por Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer – Twitter: @dademuch
Se hacen trabajos, ejercicios, clases online, talleres, laboratorios, Academic Paper, Tesis, Monografías….Entrega Inmediata !!!…Comunícate conmigo a través de:
WhatsApp: +34 633129287
dademuchconnection@gmail.com
Te brindo toda la asesoría que necesites!! …
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
En esta guía PDF se analiza la respuesta transitoria de sistemas que forman parte de la cátedra de sistemas de control, señales y sistemas, análisis de redes eléctricas, etc. Cada solución además ofrece un código de Matlab para graficar las señales y/o la simulación de la respuesta. Cada problema tiene un costo de 12.5 euros. La Guía completa tiene un valor de 21.5 euros. Se facilita pago a través de Paypal.
A continuación, los enunciados de problemas resueltos en esta guía.
Problema 1.
Para el sistema de la Figura siguiente:
1.a Calcula y justifica el valor de la ganancia estática y la constante de tiempo cuandoG(s) y H(s):
Simular en Matlab.
1.b Analiza el comportamiento (subamortiguado, sobreamortiguado, críticamente amortiguado, inestable, oscilación mantenida) de la salida para los diferentes valores del parámetro a ante la entrada escalón unitario cuando:
El parámetro a toma valores reales. Simular en Matlab.
1.c Calcula frecuencia natural no amortiguada, frecuencia natural amortiguada, factor de amortiguamiento, tiempo de crecimiento, tiempo pico, sobre impulso máximo para el caso b. Simular en Matlab
Problema 2.
Sea el sistema adjunto:
Se pide:
2.a Obtener la función de transferencia del sistema, considerando la tensión eicomo la señal de entrada al sistema y la tensión eo como la señal de salida del sistema.
2.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende de los valores de las resistencias y del condensador?
2.c Obtener el valor del tiempo en el que la salida del sistema alcanza el 95% de su valor final, suponiendo que los valores de R y C son iguales a 1. Simular en Matlab.
Problema 3.
Para el sistema adjunto:
Se pide:
3.a Obtener la función de transferencia del sistema, considerando la tensión vicomo la señal de entrada al sistema y la tensión vo como la señal de salida del sistema.
3.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende del valor de la resistencia R?
3.c Analiza el sistema respecto al parámetro R. Simular en Matlab.
Problema 4
Se tiene un sistema cuya función de transferencia es:
Ka es una ganancia que se ajusta para obtener una respuesta deseada. Determinar el valor de Ka para obtener la respuesta que se observa en la gráfica 3. Esta salida corresponde a la respuesta al escalón unitario. Simular en Matlab.
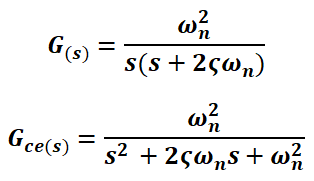
La forma estándar de la función de transferencia de un sistema de 2do orden es:
Dónde:
La ganancia estática k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn, son los parámetros de un sistema de segundo orden.
En comparación con la simplicidad de un sistema de primer orden (Sistemas de primer orden), un sistema de segundo orden exhibe una amplia gama de respuestas que deben analizarse y describirse. Mientras que variar el parámetro de un sistema de primer orden (constante de tiempo) simplemente cambia la velocidad de la respuesta, los cambios en los parámetros de un sistema de segundo orden pueden cambiar la forma total de la respuesta.
INTRODUCCIÓN: ¿De dónde proviene la ecuación (1)?
El diagrama de bloques de la Figura 1 representa a un sistema de segundo orden de tipo cero. Físicamente, este diagrama puede ser el modelo de un motor DC, el modelo de una red eléctrica o de un mecanismo con resorte, amortiguador y masa. Por ello, el sistema de segundo orden es de gran interés académico, industrial y tecnológico, de los más importantes para el estudio.
Figura 1.
Los sistemas de segundo orden son esenciales en el diseño de sistemas de control. En consecuencia, es de gran utilidad entender que el modelo de la Figura 1 suele provenir de un sistema realimentado como el de la Figura 2:
Figura 2.
El sistema de la Figura 2 se puede ver como un sistema de control básico. Una planta de segundo orden de tipo 1, con un polo en s=-2ζωn, en serie con un controlador proporcional, y realimentación unitaria. Para diseñar un sistema de control, por excelencia se utiliza principalmente la entrada escalón unitario como señal de prueba. Es así porque a partir de ella, derivando podemos hallar la respuesta al impulso unitario, e integrando, la respuesta a la rampa unitaria.
El comportamiento del sistema de control ante una entrada escalón unitario depende de estos tres factores: la ganancia k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn. Con solo conocer el valor del coeficiente de amortiguamiento ζ, podemos determinar la forma de la respuesta del sistema.
Por otra parte, en ocasiones podremos cumplir con los requerimientos de diseño de un sistema de control con sólo variar el valor de la ganancia k, como veremos en el caso siguiente, cuya respuesta aparece más adelante:
Ejemplo 1:
Para la planta de la Figura 88, diseñar un sistema de control que cumpla con los siguientes requerimientos ante una entrada escalón unitario: una salida c(t) con Sobrepaso máximo (Mp) igual al 5%, tiempo de establecimiento (ts) de 2.1 segundos, y error en estado estable a la entrada escalón unitario (ep) menor o igual al 50%:
La función de transferencia estándar (1) se deriva tanto del diagrama de bloques de la Figura 1, como del de la Figura 2, diseñada en función de estos parámetros (ganancia, frecuencia natural y coeficiente de amortiguamiento) que están ligados al comportamiento físico de la respuesta y a la situación de sus polos en el plano “s”.
TIPOS DE SISTEMAS DE SEGUNDO ORDEN: según ubicación de los polos.
Un sistema de segundo orden es aquel que posee dos polos. La ecuación (1) tiene dos polos:
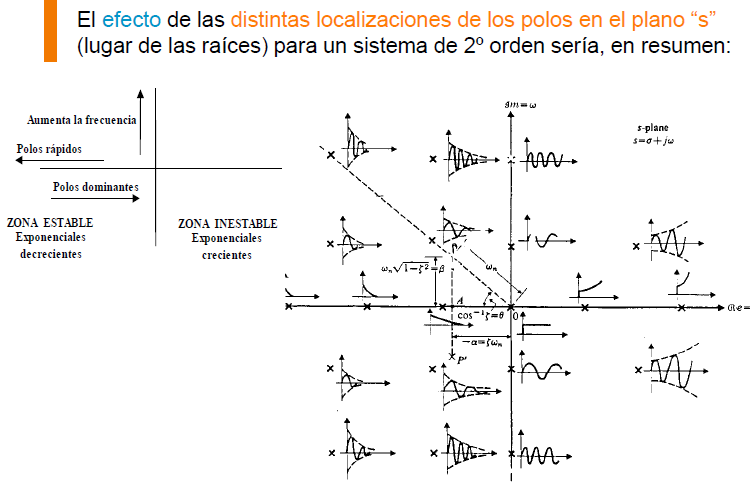
Las raíces del polinomio del denominador de la ecuación (1) son los polos del sistema. A continuación se muestra la clasificación general de la respuesta de sistemas de segundo orden a la entrada escalón unitario, determinada por la posición de sus polos en el plano “s”:
Subamortiguado (polos complejos conjugados con parte real negativa)
Críticamente amortiguado (polos reales puros – negativos e iguales – llamado polo doble)
Sobreamortiguado (polos reales puros – negativos y diferentes)
Oscilatorio (polos imaginarios puros)
Inestable (polos complejos conjugados con parte real positiva)
El tipo «Subamortiguado» es el más utilizado para el diseño de sistemas de control. Por ello analizamos el caso Subamortiguado en primer lugar y con mayor énfasis que en el resto de los casos.
TIPOS DE SISTEMAS DE SEGUNDO ORDEN: según el valor deζ (factor de amortiguamiento)
Como se dijo anteriormente, con solo conocer el valor del coeficiente de amortiguamiento ζ, podemos determinar la forma de la respuesta del sistema:
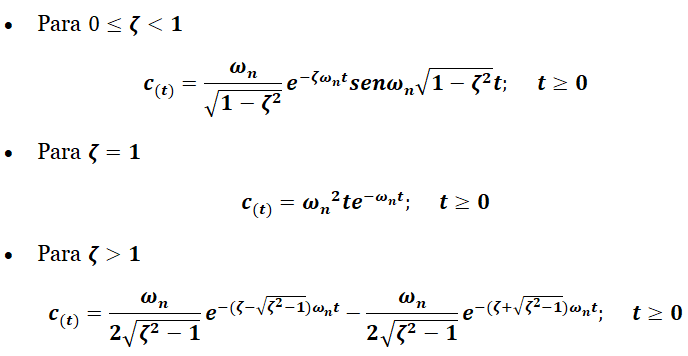
Subamortiguado (0<ζ<1)
Críticamente amortiguado (ζ=1)
Sobreamortiguado (1<ζ)
Oscilatorio (ζ=0)
Inestable (ζ<0)
La siguiente figura es un resumen del tipo de sistema y la forma de la salida del sistema de segundo orden para una entrada escalón unitario, de acuerdo al valor del coeficiente de amortiguamiento y la ubicación de los polos:
Figura 3.
Sistema de 2do orden Sub-amortiguado
Dada la función de transferencia de un sistema de control:
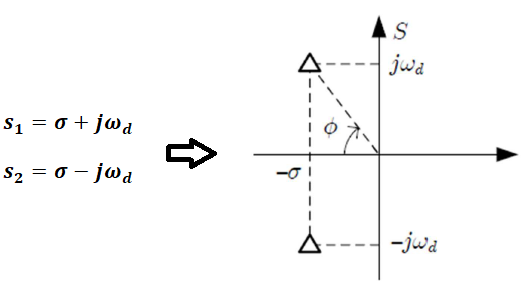
ya hemos visto que un sistema de segundo orden Sub-amortiguado es aquel cuyo coeficiente de amortiguamiento tiene valores entre cero y uno (0<ζ<1) y tiene dos polos complejos conjugados s1 y s2, localizados como lo indican las X en el plano transformado «s» siguiente:
Figura 4.
Este sistema, sometido a una entrada escalón unitario, en el dominio del tiempo presenta una salida c(t) con el siguiente comportamiento genérico:
Figura 5.
La ganancia estática k en este caso, es el valor de la salida en estado estable. Es decir:
Por cuestiones prácticas nos interesa expresar los polos como dos números complejos de la siguiente forma genérica:
Figura 6.
dónde:
A continuación vamos a obtener una relación muy útil para el proceso de diseño de controladores. Podemos ver en la Figura 6 que se forma el ángulo Φ en el triángulo señalado por líneas discontinuas. Se puede demostrar que:
Es decir, que si conocemos el valor de los polos complejos conjugados de un sistema de segundo orden, además de saber directamente que es un sistema subamortiguado, podemos determinar mediante la relación anterior el factor de amortiguamiento de dicho sistema. Y viceversa. Si nos dan el valor de ζ, podemos obtener el valor de Φ, y utilizar este valor para obtener la ubicación de los polos, un hecho relevante cuando se diseña un controlador.
Ejemplo 2:
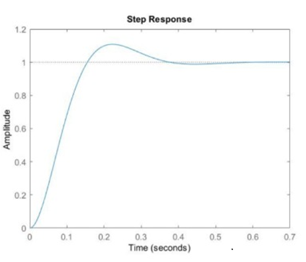
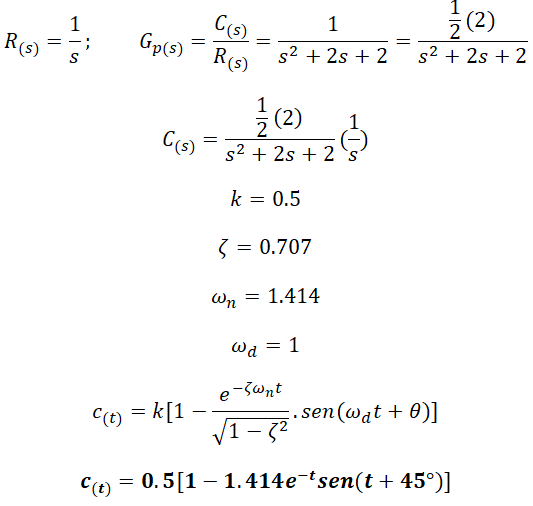
Supongamos que una planta tiene la siguiente función de transferencia:
Al simular la respuesta de este sistema a la entrada escalón unitario obtenemos la siguiente curva:
>> G=tf([1],[1 2 2]);
>>step(G)
Figura 7
La curva de salida se corresponde con el de un sistema de segundo orden subamortiguado. Podemos conocer los valores de los parámetros de importancia mediante:
>> damp(G)
Podemos corroborar estos valores mediante las ecuaciones formuladas:
k=0.5
Respuesta del sistema de 2do orden subamortiguado en el tiempo.
Sabemos que la transformada de Laplace del escalón unitario es 1/s. Por lo tanto la expresión para la salida C(s) en el dominio transformado es:
Podemos determinar la ecuación de la salida c(t) en el dominio del tiempo, aplicando la anti-transformada de Laplace a C(s):
La siguiente gráfica muestra cada uno de los componentes de la salida c(t):
Figura 8.
La Figura 8 muestra los factores que se suman y se multiplican para generar la salida c(t) (interesante es tener presente que se trata la respuesta al escalón unitario del sistema de segundo orden subamortiguado). La salida es oscilatoria amortiguada. La frecuencia de dicha señal oscilatoria es ahora ωd (frecuencia amortiguada). La oscilación está amortiguada por el término exponencial decreciente.
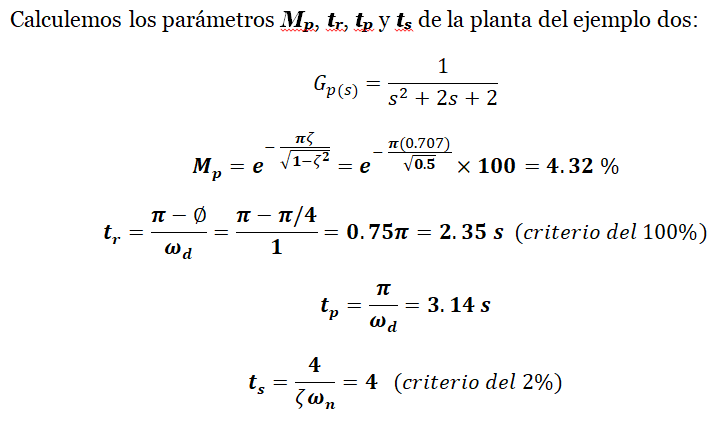
Ejemplo 3. Aplicando una entrada escalón unitario y aplicando el procedimiento descrito anteriormente para la planta del ejemplo dos, vemos que:
Especificaciones de respuesta transitoria para un sistema de control de 2do grado subamortiguado
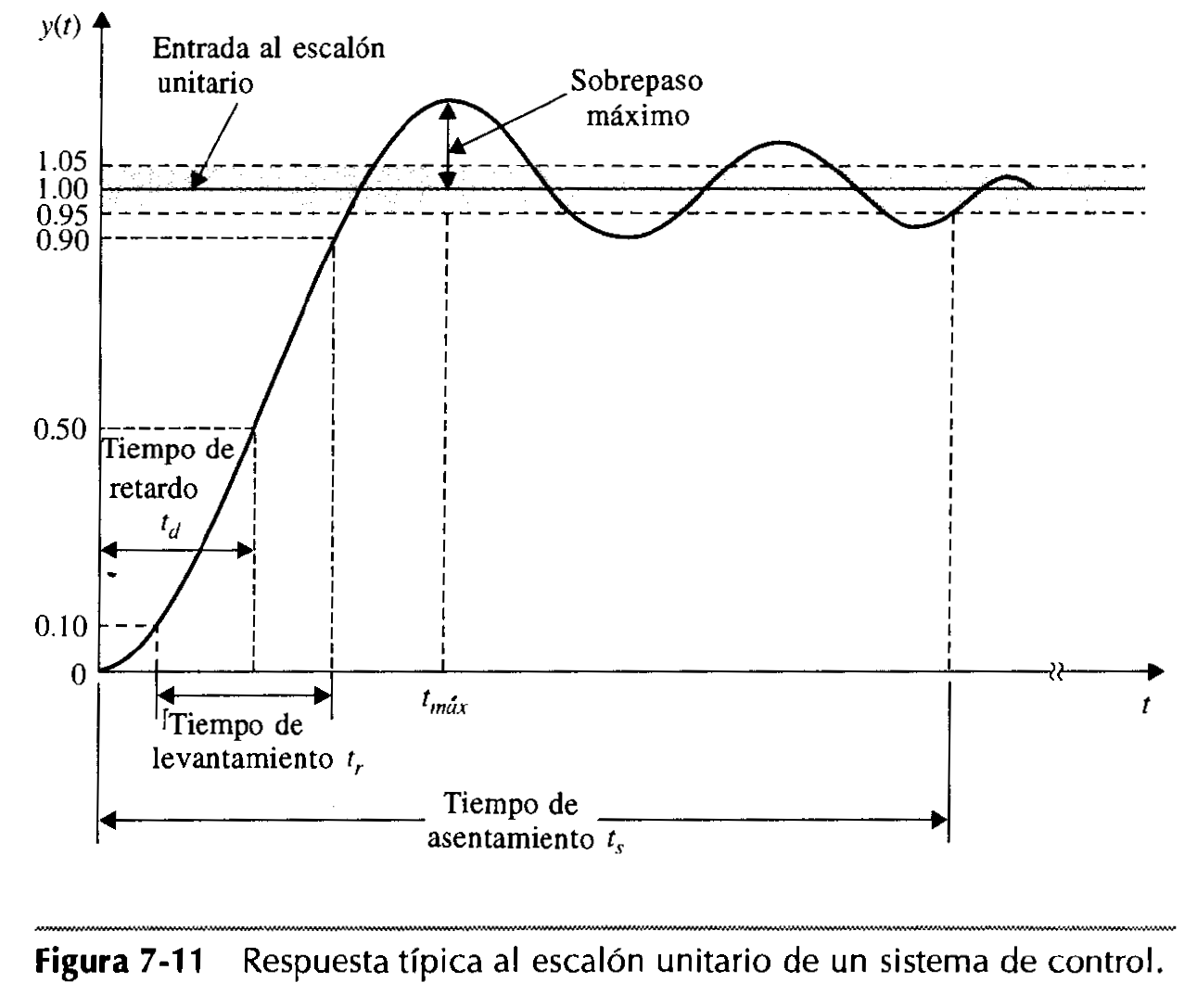
Especificaciones de diseño. Los sistemas de control se diseñan para realizar tareas específicas. Para diseñar un sistema de control, lo primero es conocer las condiciones que debe cumplir ante una entrada escalón unitario. Si se espera que la salida del sistema se comporte como la de un sistema segundo orden subamortiguado, las especificaciones de diseño son las siguientes:
Sobrepaso máximo (Mp): es el valor pico máximo de la curva de respuesta medida a partir de la unidad. Según otra bibliografía, es también la cantidad en que la forma de la curva de salida sobrepasa el valor final de la salida, expresada en porcentaje.
Tiempo de retardo (Td): es el tiempo requerido para que la respuesta del sistema alcance la mitad del valor final por primera vez.
Tiempo de asentamiento (Ts): es el tiempo requerido para que las oscilaciones amortiguadas transitorias alcancen y permanezcan dentro del ±2% o del ±5% del valor final o valor en estado estable.
Tiempo de levantamiento (Tr): es el tiempo requerido para que la respuesta del sistema pase del 10% al 90% del valor final. En otras palabras, para que vaya de 0.1 del valor final al 0.9 del valor final. Un segundo criterio define este tiempo como aquel en el que se alcanza por primera vez el valor en estado estable (criterio del 100%).
Tiempo pico (Tpó Tmáx):es el tiempo requerido para que la respuesta del sistema alcance el pico del levantamiento máximo.
En especial, los requerimientos para el diseño de un sistema de seguimiento (servosistema) se especifican en base a estos conceptos.
Fórmulas para las especificaciones de un Sistema de 2do orden Sub-amortiguado
A continuación se presentan fórmulas que pueden ayudar a determinar analíticamente las especificaciones de un sistema de segundo orden sub-amortiguado para el que se conoce la forma estándar de la función de transferencia, ecuación (1).
Sobrepaso máximo (Mp). Consideran como la salida del sistema:
donde c(t(p)) es el valor de la salida en el tiempo pico, mientras c(∞) es el valor de la salida en estado estable.
Tiempo pico (Tp):
Factor de amortiguamiento (ζ):
Es muy útil contar además con la expresión para el factor de amortiguamiento relativo ζ en función del sobrepaso Mp dado en porcentajes:
Tiempo de asentamiento (Ts)
Tiempo de levantamiento (Tr)
Tiempo de retardo (Td)
(interesante es recordar que estos parámetros sólo aplican para la respuesta al escalón unitario del sistema de segundo orden subamortiguado)
Ejemplo 4: Calculamos estos parámetros Mp, tr, tp y ts para la planta del ejemplo 2:
>> stepinfo(G)
La respuesta transitoria de un sistema de control en la práctica siempre exhibe oscilaciones amortiguadas antes de alcanzar el estado estable. Esto ocurre porque los sistemas tienen componentes que almacenan energía y no pueden responder de manera inmediata a los cambios en la entrada. La respuesta transitoria a una entrada escalón depende de las condiciones iniciales. Es por ello que en la práctica se acostumbra considerar que el sistema está inicialmente en reposo de modo tal que las condiciones iniciales (la salida y sus derivadas) son iguales a cero.
RECOMENDACIÓN: Para estudiar la aplicación de estos conceptos ver:
Establecer la ganancia es el primer paso encaminado a ajustar el sistema para un desempeño satisfactorio. Sin embargo, en muchos casos prácticos el solo ajuste de la ganancia tal vez no proporcione una alteración suficiente del comportamiento del sistema para cumplir las especificaciones dadas. En este caso, es necesario volver a diseñar el sistema. Este nuevo diseño a adición de un dispositivo apropiado se denomina compensación. Para mayor información visita:
Efecto de añadir un polo a un sistema de 2do orden Subamortiguado.
Un polo adicional (de valor negativo) hace al sistema más lento, tanto más cuanto más e acerque al origen.
Sistema reducido equivalente
Un sistema de orden mayor a dos, de función de transferencia G1(s), se puede reducir a un sistema reducido equivalente con función de transferencia G2(s), si teniendo el segundo menor número de polos y/o ceros que el primero, la respuesta temporal de ambos es similar. El objetivo de este procedimiento es despreciar los efectos sobre el comportamiento del sistema de unos polos y/o ceros frente a los que se consideren dominantes.
Para reducir, se deben cumplir las siguientes reglas:
Nunca despreciar (simplificar) el efecto de un polo inestable;
Despreciar los polos y/o ceros relativamente más alejados del origen;
Simplificar parejas de polos-ceros relativamente cercanos entre sí;
Los sistemas real y reducido equivalentes deben tener la misma ganancia estática.
Sistema de 2do orden Oscilatorio: No amortiguado
Un sistema de segundo orden no amortiguado es aquel cuyo coeficiente de amortiguamiento es igual a cero (ζ=0). Este sistema tiene dos polos imaginarios puros. Sometido a una entrada escalón unitario presenta el siguiente comportamiento genérico:
La frecuencia de dicha salida oscilatoria es ωn, es decir, la frecuencia natural o no amortiguada del sistema. Cuanto más lejos están los polos del origen, mayor es la frecuencia natural.
Sistema de segundo orden críticamente amortiguado
Un sistema de segundo orden con amortiguamiento crítico es aquel cuyo coeficiente de amortiguamient0 es igual a uno (ζ=1).Este sistema tiene dos polos reales negativos e iguales y su valor es igual a –ωn.
Sometido a una entrada escalón unitario presenta el siguiente comportamiento genérico:
En este caso como se puede ver en la Figura anterior, la salida c(t) es el producto de una exponencial decreciente y una recta. Representa la respuesta más rápida posible del sistema sin que haya oscilación.
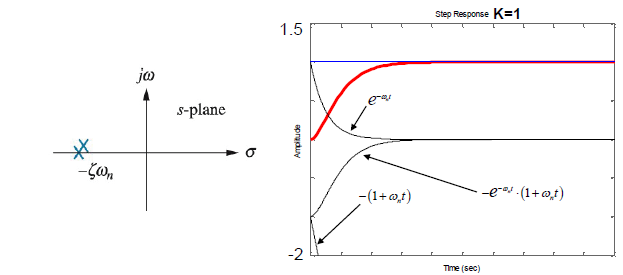
Sistema de segundo orden con sobre-amortiguamiento
Un sistema de segundo orden con sobre amortiguamiento es aquel cuyo coeficiente de amortiguamient0 es mayor que uno (ζ>1).Este sistema tiene dos polos reales negativos y distintos:
La respuesta de este sistema está dominada por el polo más lento, el polo s1 de acuerdo con la siguiente figura que muestra el comportamiento genérico del sistema sometido a una entrada escalón unitario:
Es decir, s2, el polo más rápido, se puede despreciar. En este caso, la salida c(t) es la combinación lineal de dos exponenciales.
Respuesta al impulso unitario de un sistema de segundo orden
Para una entrada impulso unitario r(t), la transformada de Laplace correspondiente es R(s)=1, la respuesta C(s) impulso unitario del sistema de segundo orden de la ecuación (1) es:
La transformada inversa de Laplace para esta ecuación da la salida c(t) en el tiempo que, de acuerdo con el valor del coeficiente de amortiguamiento ζ, es:
También se puede obtener la respuesta c(t) del sistema a la entrada impulso unitario, diferenciando la respuesta al escalón unitario.
Aplicar control PID a Función de Transferencia - 1er grado o 2do grado - Catálogo 14
Este catálogo ofrece la solución analítica completa a prácticas de configuración y diseño de sistemas de control para Función de Transferencia de primer orden o de segundo orden, generalmente aplicando un controlador PID, álgebra de bloques, y la teoría que forma parte de la cátedra de sistemas de control, señales y sistemas, ingeniería industrial, mecatrónica, etc. Además, la solución implica el uso de Matlab y/o Simulink. Cada laboratorio tiene un costo de 14.5 euros. Se facilita pago a través de Paypal. También el autor ofrece servicio para resolver prácticas y laboratorios a particulares: +34633129287.
Práctica 1
Para la función de transferencia:
Función de Transferencia de 1er orden.
Graficar la respuesta para una entrada de 250 sin control en lazo abierto y sin control en lazo cerrado;
Graficar la salida aplicando control PID con las siguientes constantes de Kp=60; Ki=400; Kd=10 y con una entrada escalón unitario. Ejecutar ambas: Solución analítica y Solución haciendo uso de la herramienta sisotool de Matlab para configurar el controlador.
Simular en Simulink
Aplicar control a función de transferencia de 1er-2do orden – Catálogo 14
Pago por una (1) práctica de configuración y diseño de sistemas de control PID para Función de Transferencia de primer orden o de segundo orden. Luego de pagar por favor comunicarse a Whatsapp +34633129287
Problemas resueltos de Análisis de respuesta transitoria de sistemas lineales - Matlab - Catálogo 9
En esta guía PDF se analiza la respuesta transitoria de sistemas que forman parte de la cátedra de sistemas de control, señales y sistemas, análisis de redes eléctricas, etc. Cada solución además ofrece un código de Matlab para graficar las señales y/o la simulación de la respuesta. Cada problema tiene un costo de 12.5 euros. La Guía completa tiene un valor de 21.5 euros. Se facilita pago a través de Paypal.
A continuación, los enunciados de problemas resueltos en esta guía.
Problema 1.
Para el sistema de la Figura siguiente:
1.a Calcula y justifica el valor de la ganancia estática y la constante de tiempo cuandoG(s) y H(s):
Simular en Matlab.
1.b Analiza el comportamiento (subamortiguado, sobreamortiguado, críticamente amortiguado, inestable, oscilación mantenida) de la salida para los diferentes valores del parámetro a ante la entrada escalón unitario cuando:
El parámetro a toma valores reales. Simular en Matlab.
1.c Calcula frecuencia natural no amortiguada, frecuencia natural amortiguada, factor de amortiguamiento, tiempo de crecimiento, tiempo pico, sobre impulso máximo para el caso b. Simular en Matlab
Problema 2.
Sea el sistema adjunto:
Se pide:
2.a Obtener la función de transferencia del sistema, considerando la tensión eicomo la señal de entrada al sistema y la tensión eo como la señal de salida del sistema.2.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende de los valores de las resistencias y del condensador?2.c Obtener el valor del tiempo en el que la salida del sistema alcanza el 95% de su valor final, suponiendo que los valores de R y C son iguales a 1. Simular en Matlab.
Problema 3.
Para el sistema adjunto:
Se pide:
3.a Obtener la función de transferencia del sistema, considerando la tensión vicomo la señal de entrada al sistema y la tensión vo como la señal de salida del sistema.
3.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende del valor de la resistencia R?
3.c Analiza el sistema respecto al parámetro R. Simular en Matlab.
Problema 4
Se tiene un sistema cuya función de transferencia es:
Ka es una ganancia que se ajusta para obtener una respuesta deseada. Determinar el valor de Ka para obtener la respuesta que se observa en la gráfica 3. Esta salida corresponde a la respuesta al escalón unitario. Simular en Matlab.
Método de pago
Catálogo 9 – Respuesta transitoria
Pago por un ejercicio – 12.5 euros. Después de pagar por favor comunicarse al whatsapp +34633129287 o al email dademuchconnection@gmail.com para la entrega.
Pago por toda la guía – 21.5 euros. Después de pagar por favor comunicarse al whatsapp +34633129287 o al email dademuchconnection@gmail.com para la entrega.
El valor de la salida de un sistema en estado estable se puede determinar utilizando El teorema del valor final, cuando se cuenta con la función de transferencia del sistema, utilizando además una señal de entrada escalón unitario como señal de prueba.
El teorema del valor final se plantea del modo siguiente. Si f(t) y df(t)/dt se pueden transformar por el método de Laplace; si F(s) es la transformada de Laplace de f(t); y si existe el límite de f(t) cuando el tiempo tiende a infinito, entonces:
Ejemplo:
Sea G(s) la función de transferencia de un sistema cualquiera cuya entrada es la señal x(t) y la salida es la señal y(t):
¿Cuál es el valor en estado estable y(∞) de la señal de salida y(t) para una entrada x(t) que es la función escalón unitario?
Respuesta:
Si la señal de entrada x(t) del sistema es un escalón unitario, entonces su transformada de Laplace X(s) es:
Despejamos la transformada de Laplace de la señal de salida, es decir, Y(s), de la ecuación (1) y sustituimos en ella la ecuación (2):
Aplicamos entonces el teorema del valor final para hallar y(∞) a la ecuación (3):
Por tanto, cuando ha pasado mucho tiempo y el sistema cuya función de transferencia es G(s) se estabiliza, la salida del sistema es igual a 1. Podemos corroborar este resultado mediante la siguiente simulación en Matlab:
>> G=tf([1],[1 1]);
>> step(G)
Fuentes:
Control Systems Engineering, Nise
Sistemas de Control Automatico Benjamin C Kuo
Modern_Control_Engineering, Ogata 4t
Escrito por: Larry Francis Obando – Technical Specialist – Educational Content Writer.
Mentoring Académico / Empresarial / Emprendedores
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Si lo que Usted necesita es resolver con urgencia un problema de “Sistema Masa-Resorte-Amortiguador” (encontrar la salida X(t), gráficas en Matlab del sistema de 2do Orden y parámetros relevantes, etc.), o un problema de “Sistema de Control Electromecánico” que involucra motores, engranajes, amplificadores diferenciales, etc…para entregar a su profesor en dos o tres días, o con mayor urgencia…o simplemente necesita un asesor para resolver el problema y estudiar para el próximo examen…envíeme el problema…Yo le resolveré problemas de Sistemas de Control, le entrego la respuesta en digital y le brindo una video-conferencia para explicarle la solución…incluye además simulación en Matlab.
La derivada del desplazamiento angular de salida del motor dθm(s)/dt, se realimenta negativamente a la entrada del sistema para mejorar el desempeño. En este caso se utiliza un tacómetro en lugar de diferenciar físicamente θm(s).
El sistema de seguimiento de la Figura 1 con realimentación tacométrica tendrá entonces el siguiente diagrama de bloques:
Figura 3. Diagrama de bloques del Sistema de seguimiento con realimentación de velocidad.
Dónde kt es la constante de ganancia del tacómetro. Reduciendo la realimentación negativa interna obtenemos el diagrama de la Figura 4:
Figura 4.
De esta manera obtenemos la Función de Transferencia Directa Gm(s) del sistema de control de posición con realimentación de velocidad:
Figura 5.
Comparación de la respuesta transitoria del sistema antes y después de la realimentación de velocidad.
En construcción…
Breve reseña sobre El Tacómetro.
Al igual que los potenciómetros, los tacómetros son dispositivos electromecánicos que convierten energía mecánica en energía eléctrica. Trabaja esencialmente como un generador de voltaje, con la salida de voltaje proporcional a la magnitud de la velocidad angular del eje de entrada. La Figura 4-33 refleja el uso común de un tacómetro en un sistema de control de velocidad:
La dinámica del tacómetro se puede representar como:
Donde et(t) es el voltaje de salida, θ(t)es el desplazamiento del motor en radianes, ω(t)es la velocidad del rotor en rad/s, y Kt es la constante del tacómetro. Luego, términos del desplazamiento del motor:
Para el estudio de la respuesta transitoria de un sistema de control, lo más conveniente es contar con la representación prototipo. Es decir, si tenemos el modelo matemático de un sistema, debemos representar dicho sistema mediante un diagrama de bloques donde esté claramente expresada la función de transferencia directa G(s) y una realimentación negativa unitaria como se ilustra en la Figura 1:
Figura 1. Sistema de control con realimentación unitaria
Ya sabemos que la función de transferencia a lazo cerrado C(s)/R(s) del sistema de control de la Figura 1 se determina mediante la siguiente fórmula:
Denominamos a C(s)/R(s) “modelo prototipo” (o configuración prototipo), cuando tiene la siguiente forma:
Dónde:
Otra forma de verlo es:
Para el análisis de la respuesta transitoria es conveniente escribir:
Donde σes denominado atenuación; el factor actual de amortiguamiento B y el factor de amortiguamiento crítico Bc que es igual a dos veces la raíz cuadrada de JK:
Respuesta transitoria de un sistema de control de posición
Aplicaremos esta teoría al modelo para el sistema de control de posición deducido anteriormente, cuyo esquema se ilustra en la Figura 2:
Figura 2. Sistema de Control de posición.
Para el sistema de la Figura 2 hemos desarrollado el siguiente diagrama de bloques:
Figura 3. Diagrama de bloques de un sistema de control de posición.
Como podemos ver en la Figura 3, la función de transferencia directa G(s) que utilizaremos para determinar el modelo prototipo y a partir de allí analizar la respuesta transitoria, es:
Antes de determinar la ecuación prototipo (representación prototipo) para el sistema de seguimiento de la Figura 2, equivalente a la ecuación (1), considere los siguientes valores para los parámetros de la función G(s):
Tabla 1.
Sustituimos estos valores en la ecuación (2), despejamos convenientemente y obtenemos la función de transferencia directa G(s) evaluada en el punto de operación de interés en el cual funciona el sistema de seguimiento de la Figura 2:
Con este resultado actualizamos el diagrama de bloques de la Figura 3:
Figura 4. Diagrama de bloques del sistema de seguimiento funcionando en el punto de operación determinado por la Tabla 1.
El diagrama de bloques de la Figura 4 ya nos permite utilizar Matlab para evaluar la respuesta transitoria del sistema a una entrada escalón unitario. Sin embargo, podemos calcular dicha respuesta de forma analítica utilizando las ecuaciones (3) y (4), y el modelo prototipo de la ecuación (1):
La ecuación (5) es el equivalente de la ecuación (1) para el sistema de seguimiento de la Figura 2. Entonces, podemos asegurar que la frecuencia natural ωn y el factor de amortiguamiento relativo ζ de dicho sistema son:
Este resultado para el valor del factor de amortiguamiento relativo ζ indica que estamos en presencia de un sistema subamortiguado.
En base a los resultados obtenidos para la frecuencia natural ωn y el factor de amortiguamiento relativo ζ del sistema de control de la Figura 2, podemos evaluar los parámetros de la respuesta transitoria del sistema para una entrada escalón unitario
Para ver la teoría relacionada ver: Respuesta Transitoria de un Sistema de Control. De acuerdo con este documento, se presentan ahora los parámetros de importancia en la respuesta transitoria de un sistema a una entrada escalón unitario, y de inmediato se evalúa cada parámetro para el sistema de interés:
Sobrepaso máximo (Mp)
Tiempo de asentamiento (Ts)
Tiempo de retardo (Td)
Simulación en Matlab
Podemos corroborar estos resultados mediante la simulación en Matlab. Para obtener la respuesta transitoria al escalón unitario del sistema de la Figura 2, ejecutamos los siguientes comandos:
>> numg=5.5;
>> deng=conv([1 0],[0.13 1]);
>> G=tf(numg,deng)
>> sys=feedback(G,1)
>> step(sys)
Figura 5. Respuesta al escalón unitario del sistema de seguimiento.
La gráfica de la Figura 5 nos una respuesta deseable. Es deseable que la respuesta transitoria de un sistema de control dado sea lo suficientemente rápida y lo suficientemente amortiguada. Esto se logra mediante un factor de amortiguamiento ζ entre 0.4 y 0.8. Pequeños valores de ζ(ζ<0.4) producen excesivo levantamiento máximo en la respuesta transitoria, mientras que un sistema con alto ζ(ζ>0.8) responde de manera muy lenta. En este ejemplo, resulta aceptable el valor de ζ=0.59. Veremos además que el levantamiento máximo y el tiempo de levantamiento entran en conflicto. Es decir, no es posible disminuir el tiempo de levantamiento y el levantamiento máximo al mismo tiempo.
La respuesta además es bastante rápida (0.22 segundos), y apenas con 10% de sobrepaso. Por último, a medida que pasa el tiempo, la respuesta tiende a uno como valor final, lo que anticipa un error en estado estacionario igual a cero. Esto indica que la salida sigue a la señal de referencia, es decir, la carga estará ubicada en el punto que desea el operador del sistema al indicar él mismo, mediante el potenciómetro de entrada, dicho valor de referencia.
La información sobre los parámetros de importancia los podemos obtener mediante el siguiente comando:
>> stepinfo(sys)
SettlingTime: 0.9111
Overshoot: 9.9906
En la Figura 6 podemos observar en la gráfica la ubicación de los valores anteriores:
Figura 6. Valores de los parámetros de respuesta transitoria.
Se puede ver que los resultados de la simulación son bastante parecidos a los obtenidos analíticamente. Utilizando la función damp(), podremos encontrar los valores del coeficiente de amortiguamiento ζ , la constante de tiempo τ y el de la frecuencia natural ωn:
>> damp(sys)
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
-3.85e+00 + 5.25e+00i 5.91e-01 6.50e+00 2.60e-01
-3.85e+00 – 5.25e+00i 5.91e-01 6.50e+00 2.60e-01
Por su parte, se puede ver que los resultados de la simulación para la frecuencia natural ωn y el factor de amortiguamiento relativo ζ del sistema, son exactamente iguales a los obtenidos analíticamente.
Si lo que Usted necesita es resolver con urgencia un problema de “Sistema Masa-Resorte-Amortiguador” (encontrar la salida X(t), gráficas en Matlab del sistema de 2do Orden y parámetros relevantes, etc.), o un problema de “Sistema de Control Electromecánico” que involucra motores, engranajes, amplificadores diferenciales, etc…para entregar a su profesor en dos o tres días, o con mayor urgencia…o simplemente necesita un asesor para resolver el problema y estudiar para el próximo examen…envíeme el problema…Yo le resolveré problemas de Sistemas de Control, le entrego la respuesta en digital … simulación en Matlab opcional.
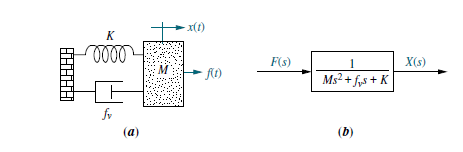
La función sinusoidal y la función exponencial representan muchos procesos de la naturaleza. En especial, son de gran utilidad para representar el caso de movimientos amortiguados en el campo de la mecánica. La Figura (1) muestra la Función de Transferencia para un sistema masa-resorte-amortiguador simple:
Figura 1. Sistema masa-resorte-amortiguador
La dinámica del sistema de la Figura (1) se describe mediante una sola ecuación diferencial:
En la ecuación (5), x(t) es el desplazamiento horizontal del sistema, que es un desplazamiento sinusoidal amortiguado, conocido como movimiento armónico amortiguado, concepto básico para la física y la ingeniería mecánica clásica.
La siguiente ecuación es una solución para la ecuación diferencial (5). Se trata de una función exponencial multiplicada por una función sinusoidal:
Supongamos el siguiente ejemplo para la ecuación anterior de x(t):
Este resultado se puede visualizar a través de una simulación computarizada, introduciendo el siguiente código en Matlab:
>> t=0:0.01:30;
>> x=5*exp(-0.1*t).*cos(4*t-0.7048);
>> plot(t,x)
>> grid
>> xlabel(‘Tiempo(segundos)’)
>> ylabel(‘Desplazamiento X(metros)’)
Figura 2. Movimiento armónico amortiguado
Fuentes:
Fundamentos_de_Señales_y_Sistemas_usando la Web y Matlab
Análisis de sistemas lineales asistido con Scilab, Ebert Brea.
Analisis_de_Sistemas_Lineales
Oppenheim – Señales y Sistemas
Revisión literaria hecha por:
Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
Determinar los valores de K y k tal que el sistema tenga un factor de amortiguamiento relativo ζ de 0.7 y una frecuencia natural ωn de 4 rad/s.
RESPUESTA
1. Lo primero que se aconseja hacer es obtener el modelo del sistema de la Figura 5-84 que sea equivalente al sistema de segundo orden prototipo, el cual es el siguiente:
Modelo Prototipo
Donde definimos la función de transferencia directa G(s) y la función de transferencia a lazo cerrado Gce(s) como sigue:
2. Determinamos G(s) y Gce(s) en relación al sistema de la Figura 5-84:
Donde G1(s) es la función de transferencia del lazo cerrado interno formado por K/(s+2) y k:
Luego, sustituimos G1(s) en la ecuación de G(s). Actuando de esta manera, obtenemos las funciones de transferencia del sistema de la Figura 5-84, equivalentes al sistema prototipo:
3. Con estas dos funciones podemos obtener lo parámetros que se solicitan en el enunciado, es decir, K y k tal que el sistema tenga un factor de amortiguamiento relativo ζ de 0.7 y una frecuencia natural ωn de 4 rad/s. Para ello comparamos G(s) y Gce(s) obtenidos en el paso 1 con los obtenidos en el paso 2. Así obtenemos que:
Sustituyendo los valores de las variables aportadas en el enunciado, y despejando, obtenemos el siguiente resultado:
Si lo que Usted necesita es reducir un Diagrama de Bloques complejo, resolver con urgencia un problema de “Sistema Masa-Resorte-Amortiguador” (encontrar la salida X(t), gráficas en Matlab del sistema de 2do Orden y parámetros relevantes, etc.), o resolver un problema más complejo que involucra el uso de dispositivos electromecánicos (motor, sensor, etc) en un sistema de control…para entregar a su profesor en dos o tres días, o con mayor urgencia…o simplemente necesita un asesor para resolver el problema y estudiar para el próximo examen…envíeme el problema..Yo le resolveré cualquier problema de Sistemas de Control, le entrego la respuesta en digital y le brindo una video-conferencia para explicarle la solución…incluye además simulación en Matlab.



 La función de transferencia entre la señal de error e(t) y la señal de entrada r(t) es:
La función de transferencia entre la señal de error e(t) y la señal de entrada r(t) es: Dado que:
Dado que: El error en estado estable ess del sistema es:
El error en estado estable ess del sistema es: El error en estado estable ess del sistema para el escalón unitario es:
El error en estado estable ess del sistema para el escalón unitario es: La constante de error de posición estática Kp se define utilizando la función de transferencia a lazo abierto G(s)H(s), mediante :
La constante de error de posición estática Kp se define utilizando la función de transferencia a lazo abierto G(s)H(s), mediante : Por ende, el error en estado estable ess del sistema para el escalón unitario, en términos de la constante de error de posición estática Kp es:
Por ende, el error en estado estable ess del sistema para el escalón unitario, en términos de la constante de error de posición estática Kp es:


 De donde:
De donde: Este resultado es el esperado ya que el sistema representado por la función de transferencia directa G(s) es un sistema tipo 1. Revisar clasificación de los sistemas en: Error en estado estable de un sistema de control
Este resultado es el esperado ya que el sistema representado por la función de transferencia directa G(s) es un sistema tipo 1. Revisar clasificación de los sistemas en: Error en estado estable de un sistema de control  Donde Kv es la constante de error de velocidad estática:
Donde Kv es la constante de error de velocidad estática: De donde:
De donde: Te puede interesar:
Te puede interesar:




































 Dónde:
Dónde:










 Es decir:
Es decir:




 De donde:
De donde:





 Simular en Matlab.
Simular en Matlab.
 Se pide:
Se pide:

 Dónde:
Dónde:
 La ganancia estática k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn,
La ganancia estática k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn, 















 En especial, los requerimientos para el diseño de un sistema de seguimiento (servosistema) se especifican en base a estos conceptos.
En especial, los requerimientos para el diseño de un sistema de seguimiento (servosistema) se especifican en base a estos conceptos.






 (interesante es recordar que estos parámetros sólo aplican para la respuesta al escalón unitario del sistema de segundo orden subamortiguado)
Ejemplo 4: Calculamos estos parámetros Mp, tr, tp y ts para la planta del ejemplo 2:
(interesante es recordar que estos parámetros sólo aplican para la respuesta al escalón unitario del sistema de segundo orden subamortiguado)
Ejemplo 4: Calculamos estos parámetros Mp, tr, tp y ts para la planta del ejemplo 2:






















































 En la ecuación (5), x(t) es el desplazamiento horizontal del sistema, que es un desplazamiento sinusoidal amortiguado, conocido como movimiento armónico amortiguado, concepto básico para la física y la ingeniería mecánica clásica.
La siguiente ecuación es una solución para la ecuación diferencial (5). Se trata de una función exponencial multiplicada por una función sinusoidal:
En la ecuación (5), x(t) es el desplazamiento horizontal del sistema, que es un desplazamiento sinusoidal amortiguado, conocido como movimiento armónico amortiguado, concepto básico para la física y la ingeniería mecánica clásica.
La siguiente ecuación es una solución para la ecuación diferencial (5). Se trata de una función exponencial multiplicada por una función sinusoidal:
 Supongamos el siguiente ejemplo para la ecuación anterior de x(t):
Supongamos el siguiente ejemplo para la ecuación anterior de x(t):
 Este resultado se puede visualizar a través de una simulación computarizada, introduciendo el siguiente código en Matlab:
>> t=0:0.01:30;
>> x=5*exp(-0.1*t).*cos(4*t-0.7048);
>> plot(t,x)
>> grid
>> xlabel(‘Tiempo(segundos)’)
>> ylabel(‘Desplazamiento X(metros)’)
Este resultado se puede visualizar a través de una simulación computarizada, introduciendo el siguiente código en Matlab:
>> t=0:0.01:30;
>> x=5*exp(-0.1*t).*cos(4*t-0.7048);
>> plot(t,x)
>> grid
>> xlabel(‘Tiempo(segundos)’)
>> ylabel(‘Desplazamiento X(metros)’)