To understand the concept of Transfer Function in open loop, or on the contrary, closed loop, we use a block diagram of a closed loop system, Figure 1:
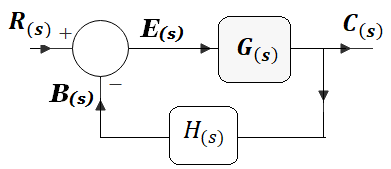
Figure 1
Where G (s) is the transfer function of the plant and H (s) is the transfer function of the sensor. The sensor generates a signal B (s) that is fed back to the summing point, where it is compared with the reference signal R (s), generating a signal called the error signal E(s). Applying block algebra to Figure 1 we can clearly see that the output signal C (s) can be obtained by multiplying E (s) by G (s):
 That is to say:
That is to say:
The function G (s) of equation (1) is known as the direct path transfer function (quotient between the output and the error signal):

Again applying block algebra to Figure 1 we can see that the feedback signal B (s) can be obtained by multiplying C (s) by H (s), that is:
 That is:
That is:
The product G(s)H (s) from equation (2) is known as the open-loop transfer function (quotient between the feedback signal and the error signal):

Important notes:
- If the transfer function H (s) of the feedback path (FT of the sensor) is equal to one, H(s)=1, only in this case, the closed-loop transfer function is equal to the transfer function direct path;
- The direct path transfer function G (s) is also known simply as the Direct Transfer Function.
That is, if the system is represented by the DB in Figure 2:

Figure 2
Then the direct transfer function G(s) is also the open-loop function.
Once again, applying block algebra to Figure 1 we can see that the output signal C (s) can be obtained by multiplying G (s) by E (s), that is:
 Solving for C (s), we obtain that:
Solving for C (s), we obtain that:
 From where:
From where:

The function C (s) / R (s) of equation (3) is known as the closed-loop transfer function (quotient between the output signal and the input signal):

Important note: Equation (3) allows us to obtain the Laplace transform of the output for any input, once we know what the closed-loop transfer function is, by:

Example:
I suggest to visit: Effect of adding a zero to a control system
Source:
- Katsuhiko Ogata, Ingeniería de Control Moderno, páginas 65-66.
Written by: Larry Francis Obando – Technical Specialist – Educational Content Writer.
Mentoring Académico / Empresarial / Emprendedores
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contact: Caracas, Quito, Guayaquil, Cuenca, España – Telf. +34633129287
Se hacen ejercicios…Atención Inmediata!!
WhatsApp: +34633129287
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com