Una señal de tiempo continuo es aquella que se define sobre un intervalo de tiempo continuo. En dicha señal, la amplitud puede tener un intervalo continuo de valores o solamente un número finito de valores distintos.
Por su parte, una señal analógica es una señal definida de tiempo continuo cuya amplitud adopta un intervalo continuo de valores. En consecuencia, una señal analógica es un caso especial de señal de tiempo continuo. Por ello, en rigor, “la señal de tiempo continuo no es necesariamente una señal analógica… no son sinónimos”.
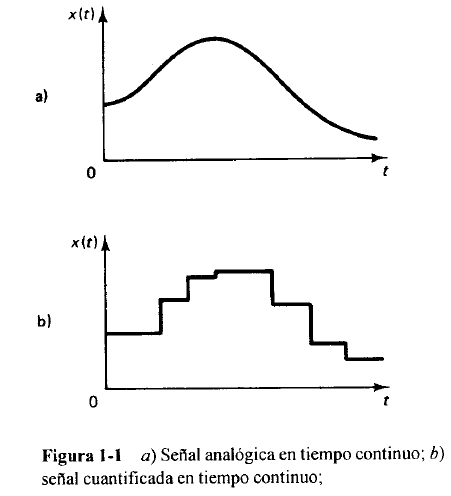
Luego, el proceso de representar una variable por medio de un conjunto de valores distintos se denomina cuantificación. Por ende, si representamos una señal de tiempo continuo por medio de un conjunto de valores distintos de su amplitud, podemos llamarla señal cuantificada en amplitud en tiempo continuo. Note la diferencia entre esta última señal y una señal analógica, mediante la siguiente figura:
La amplitud de la señal cuantificada sólo cambia en un número finito de valores.
Por otra parte, una señal en tiempo discreto es una señal definida sólo en valores discretos de tiempo (es decir, t, la variable independiente de una señal en tiempo discreto, está cuantificada). Luego, si la amplitud de una señal de tiempo discreto puede adoptar valores en un intervalo continuo, esa señal se denomina señal de datos muestreados. Por el contrario, si la amplitud de una señal de tiempo discreto sólo puede adoptar valores de un conjunto finito (es decir, la amplitudestá cuantificada), entonces estamos en presencia de una señal digital. En consecuencia:
“Una señal digital es una señal en tiempo discreto con amplitud cuantificada”
En la siguiente gráfica se ilustra la diferencia entre una señal de datos muestreados y una señal digital:
Fuentes:
Sistemas de Control en tiempo discreto – Katsuhiko Ogata
Fundamentos_de_Señales_y_Sistemas_usando la Web y Matlab
Análisis de sistemas lineales asistido con Scilab, Ebert Brea.
Cuando un sistema en tiempo discreto es lineal y invariante en el tiempo (sistema LIT), solo una representación se destaca como la más útil. Se llama Transformada de Fourier de tiempo discreto (DTFT) y se basa en el conjunto de señales exponenciales complejas {ejωn}.
THE DISCRETE-TIME FOURIER TRANSFORM (DTFT)
Si x[n] es absolutamente sumable, esto es:
Entonces, la DTFT de x[n] está dada por:
Ejemplo 1.
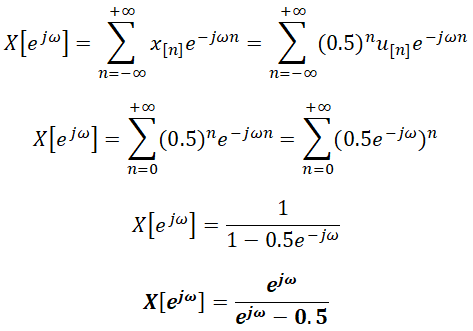
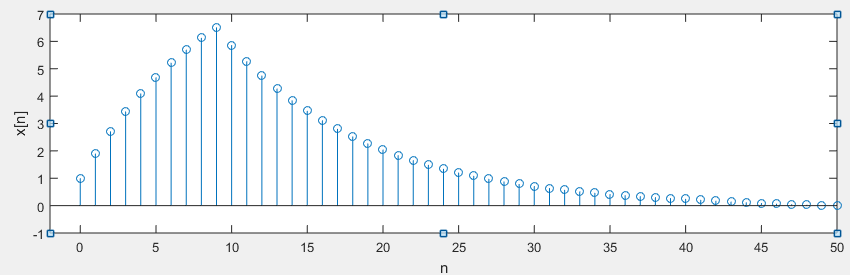
Determine the DTFT of x[n]:
Solution.
Dado que X(ejω) es una función de valor complejo, deberá trazar su magnitud y su ángulo (o la parte real y la parte imaginaria) con respecto a ω por separado para poder graficar, es decir, describir visualmente X(ejω). Ahora ω es una variable real entre –∞ y +∞, lo que significa que solo podemos graficar una parte de la función X(ejω). Usando dos propiedades importantes de la DTFT, podemos reducir este dominio al intervalo [0, π] para secuencias de valores reales.
Los siguientes scripts de Matlab nos permite graficar cada parte de X(ejω) del ejemplo 1:
w=[0:1:500]*pi/500; X=exp(i*w)./(exp(i*w)-0.5*ones(1,501)); magX=abs(X);angX=angle(X); plot(w/pi,magX); grid xlabel(‘Frequency in pi units’); ylabel(‘Magnitude’); title(‘Magnitude Part’)
This script yields:
w=[0:1:500]*pi/500; X=exp(i*w)./(exp(i*w)-0.5*ones(1,501)); angX=angle(X); plot(w/pi,angX); grid xlabel(‘Frequency in pi units’); ylabel(‘Radians’); title(‘Angle Part’)
This script yields:
Ejemplo 2.
Determine the DTFT of the following finite-duration sequence:
Solution.
Dos propiedades importamtes
Las siguientes dos propiedades son esenciales para el análisis DTFT:
Algunos pares DTFT de gran importancia
A partir de las propiedades anteriormente mencionadas, la DTFT de las siguientes secuencias, Tabla 1, revelan ser muy útiles:
Propiedades de la DTFT
Ahora presentamos el resto de las propiedades de la DTFT en la Tabla 2:
These properties will be of remarkable value for the next application of the DTFT: The z-Transformation. Estas propiedades serán de notable valor para la próxima aplicación de la DTFT: la transformada z.
When the system is linear and discrete time-invariant (LIT system), only one representation stands out as the most useful. It is called The Discrete-Time Fourier Transform (DTFT) and is based on the complex exponential signal set {ejωn}.
THE DISCRETE-TIME FOURIER TRANSFORM (DTFT)
If x[n] is absolutely summable, that is:
Then, the Discrete-Time Fourier Transform of x[n] is given by:
Example 1.
Determine the DTFT of x[n]:
Solution.
Since X[ejω]is a complex-valued function, will have to plots its magnitude and its angle (or the real part and imaginary part) with respect to ω separately to visually describe X[ejω]. Now ω is a real variable between –∞ and +∞, which would mean that we can plot only a part of the X[ejω] function. Using two important properties of the DTFT, we can reduce this domain to the [0,π] interval for real-valued sequences.
The following Matlab script allows us to plot every part of X(ejω) of example 1:
w=[0:1:500]*pi/500; X=exp(i*w)./(exp(i*w)-0.5*ones(1,501)); magX=abs(X);angX=angle(X); plot(w/pi,magX); grid xlabel(‘Frequency in pi units’); ylabel(‘Magnitude’); title(‘Magnitude Part’)
This script yields:
w=[0:1:500]*pi/500; X=exp(i*w)./(exp(i*w)-0.5*ones(1,501)); angX=angle(X); plot(w/pi,angX); grid xlabel(‘Frequency in pi units’); ylabel(‘Radians’); title(‘Angle Part’)
This script yields:
Example 2.
Determine the DTFT of the following finite-duration sequence:
Solution.
Two important properties
The following two properties are essential for DTFT analysis:
Some common DTFT Pairs
Derived from the previous properties, the DTFT of the following sequences, Table 1, are very useful:
Properties of the DTFT
We now present the complete properties of the DTFT in Table 2:
These properties will be of remarkable value for the next application of the DTFT: The z-Transformation.
We early stated that the Fourier Transform representation is the most useful signal representation for LTI systems. That is true due to the following reason:
RESPONSE TO A COMPLEX EXPONENTIALejωon
Let be the input to an LTI system represented by the impulse response h[n]:
Then:
Definition: The FREQUENCY RESPONSE
FREQUENCY RESPONSE: The Discrete-Time Fourier Transform of an impulse response is called The Frequency Response (or The Transfer Function) of an LTI system and is denoted by:
In consequence, if x[n]is the input to an LTI system:
La siguiente guía contiene los procedimientos estándar de la cátedra de sistemas de control para el cálculo del error en estado estable. Cada problema tiene un costo de 12.5 euros. La Guía completa tiene un valor de 21.5 euros. Se facilita pago a través de Paypal.
Problema 1. Para el sistema del diagrama de bloques 1 mostrado a continuación, determine: a) el error permanente en términos de k y k1, si E(s)=R(s)-Y(s). b) seleccione k1 para que el error de estado estacionario sea nulo, c) graficar para una entrada escalón.
Problema 2. Para el sistema de control indicado en el diagrama de bloques 2, determine: a) la ecuación del error estacionario, para K. Considere: K=1, 10, 100, y obtenga:
El error de estado estacionario
El gráfico y(t) para r(t) si d(t)=0
El gráfico y(t) para d(t) si r(t) =0
Presente una tabla para mostrar: Mp, ts al 2%, ess por r y por d.
Diagrama de bloques 2
Problema 3. Para el sistema del diagrama de bloques 4 mostrado a continuación, determine: a) el error permanente para una entrada rampa r(t)=t si t>0, en términos de K, km y kb; b) si km=10 y kb=0.05, seleccione K=? para que este error permanente sea igual a la unidad (1); c) graficar para una entrada escalón y para una rampa.
Filtro es un nombre genérico que se le da a un sistema lineal invariante en el tiempo (LTI por sus siglas en inglés) diseñado para un trabajo específico de selección de frecuencia o discriminación de frecuencia. Por lo tanto, los sistemas LTI de tiempo discreto también se denominan filtros digitales. Hay dos tipos de filtros digitales: filtros FIR y filtros IIR.
Introducción
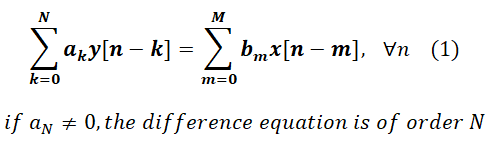
Un sistema discreto LTI también se puede describir mediante una ecuación en diferencias de coeficientes constantes lineales de la forma:
Esta ecuación describe un enfoque recursivo para calcular la salida para la muestra n (o n muestras) dados los valores de entrada y los valores de salida calculados previamente. En la práctica, esta ecuación se calcula hacia adelante en el tiempo, desde n=-∞ a n=+∞. Por tanto, otra forma de escribir la ecuación (1) es:
FiltroFIR
Si la respuesta al impulso unitario de un sistema LTI es de duración finita, el sistema se denomina filtro de respuesta de impulso de duración finita (o FIR: finite-duration impulse response). Por tanto, para un filtro FIR h[n]=0paran<n1y paran>n2. La siguiente parte de la ecuación de diferencia (2) describe un filtro FIR causal:
Además, h[0]=bo , h[1]=b1 ,… h[M]=bM. mientras que todos los demás h[n]’s valen 0. Los filtros FIR también se denominan filtros no recursivos o de promedio móvil (MA: non-recursive or moving average). En Matlab, los filtros FIR se representan como valores de respuesta de impulso {h[n]} o como coeficientes de ecuación de diferencia {bm} y {a0 =1}. Por lo tanto, para implementar filtros FIR en Matlab, podemos usar la función conv(x,h) o la función filter(b,1,x). Vea el siguiente ejemplo:
Ejemplo 1.
Let the following rectangular pulse x[n] be an input to an LTI system with impulse response h[n]:
Determine the output y[n] of the system.
Solution:
In Elementary sequences we have implemented the function stepseqfor plotting the unit step function in discrete time, or any combination as example 1. Next Script allows plotting x[n].
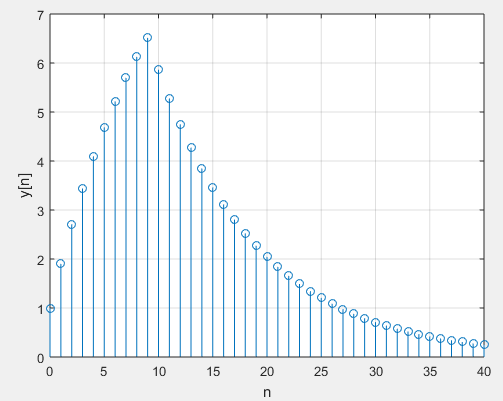
Figure 4. Output sequence y[n]=x[n]*h[n] for example 1.
Hay una diferencia en los resultados de estas dos implementaciones que debe tenerse en cuenta. Como puede ver en la Figura 3, la secuencia de salida de la función conv(x,h) tiene una longitud mayor que las secuencias x[n] y h[n]. Por otro lado, la secuencia de salida de la función de filter(h,1,x) en la Figura 4 tiene exactamente la misma longitud que la secuencia de entrada x[n]. En la práctica, para la convolución de señales digitales se recomienda el uso de la función filter.
Cuidado: la función filter se puede utilizar para calcular la convolución indirectamente. Eso fue posible debido a que la respuesta al impulso en el ejemplo 1 era una secuencia exponencial infinita orientada a un lado para la cual podríamos determinar una representación de ecuación de diferencia. No todas las respuestas impulsionales de longitud infinita se pueden convertir en ecuaciones en diferencias.
IIR Filter
If the impulse response of an LTI system is of infinite duration, then the system is called an infinite-duration impulse response (or IIR) filter. The following part of the difference equation (2):
Si la respuesta al impulso de un sistema LTI es de duración infinita, entonces el sistema se denomina filtro de respuesta al impulso de duración infinita (o IIR: infinite-duration impulse response). Considere la siguiente parte de la ecuación en diferencias (2):
La ecuación previa describe un filtro recursivo en el que la salida y[n] se calcula de forma recursiva a partir de sus valores calculados previamente y se denomina filtro autorregresivo (AR: autoregressive). La respuesta al impulso de dicho filtro es de duración infinita y, por lo tanto, representa un filtro IIR. La ecuación general (2) también describe un filtro IIR. Tiene dos partes: una parte AR y una parte MA. Dicho filtro IIR se denomina promedio móvil autorregresivo o filtro ARMA. En Matlab, los filtros IIR se describen mediante los coeficientes de ecuación de diferencia {bm} y {ak} y se implementan mediante la función de filter(b,a,x). Vea el siguiente ejemplo:
Example 2
Given the following difference equation:
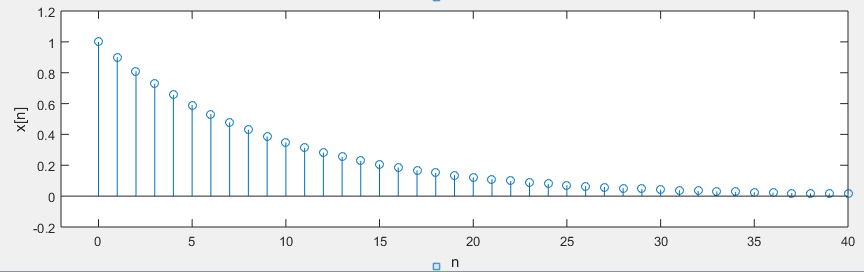
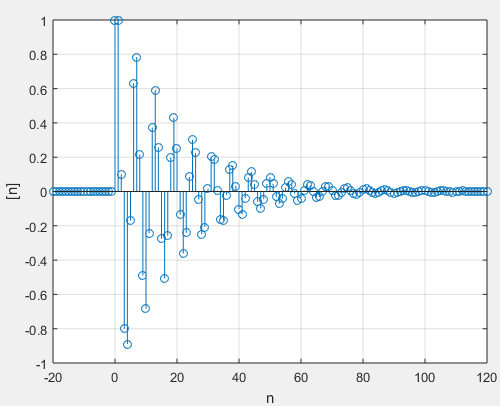
Calculate and plot the impulse response h[n] at n=-20,…,100
Calculate and plot the unit step response s[n] at n=-20,…,100
From Figure 1 we see that h[n] is practically zero n>120. Hence the sum:
Can be determined with the following script:
sum(abs(h))
This yields:
ans = 14.8785
That is to say:
This result implies that the system is stable. An alternate approach is to use the stability condition of the roots:
z=roots(a); magz=abs(z)
magz =
0.9487
0.9487
Dado que la magnitud de ambas raíces es menor que uno, el sistema es estable.
En realidad, hay dos formas de resolver una ecuación en diferencias con coeficientes constantes lineales: encontrar la solución particular y la homogénea; encontrar las respuestas de entrada cero y de estado cero (the zero-input and the zero-state responses). Es mediante el uso de la transformada z que podemos derivar un método para obtener ambos.
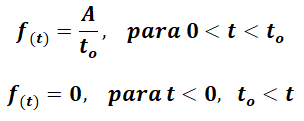
Esta función pulso puede considerarse una función escalón U(t) de altura A, que empieza en t=0, sobreimpuesta por un escalón U(t-to) de altura –A, que empieza en t=t0, es decir:
En este caso, la transformada de f(t) se obtiene mediante:
Aplicando la tabla para transformadas de Laplace (anexo) obtenemos:
Por lo tanto, la transformada de Laplace la función pulso es:
Para el pulso rectangular, simplemente debemos considerar que:
Ejemplo 1. Gráfica en Matlab
Suponga un pulso rectangular f(t) de altura A=1 y ancho t0=1. El siguiente script representa la forma más inmediata de graficar f(t) en Matlab (en este ejemplo f(t)=h1(t) es la respuesta al impulso unitario de un sistema cualquiera):
>> t=0:0.1:4;
>> h1=rectpuls(t,2);
>> plot(t,h1)
El script anterior utiliza el tiempo t para graficar la señal. Sin embargo, representar el pulso rectangular mediante la transformada de Laplace (representación en frecuencia) y utilizar dicha representación en Matlab, ofrece enormes ventajas para el análisis de sistemas lineales, y para la misma programación en Matlab, el cual ofrece un exuberante Control Toolbox para el caso en que una función está representada en frecuencia (como la función step, o la función impulse utilizada más tarde). Por ejemplo, la convolución entre dos señales en el dominio del tiempo, es un simple producto entre dos señales en el dominio de la frecuencia. Es por ello que procedemos de la siguiente manera.
La función pulso rectangular f(t) de ancho t0 puede considerarse una función escalón U(t) de altura A, que empieza en t=0, y es luego anulada (no sobreimpuesta como el caso anterior) por un escalón U(t-to) de altura –A, que empieza en t=t0, es decir:
Por lo tanto, la transformada de Laplace la función pulso rectangular es:
Ejemplo 2. Gráfica en Matlab
Suponga el pulso rectangular f(t) de altura A=1 y ancho t0=1 del ejemplo 1. El siguiente script utiliza la transformada de Laplace la función pulso rectangular en combinación con la respuesta al impulso de un sistema cualquiera, para graficar el pulso rectangular:
Es de gran valor recordar que la respuesta al impulso en el dominio de la frecuencia nos permite obtener de manera inmediata la Función de Transferencia del sistema.
Con la ecuación (2) en la mano podemos adaptar este resultado a situaciones particulares. Suponga el caso de un pulso rectangular como el mostrado en la siguiente Figura:
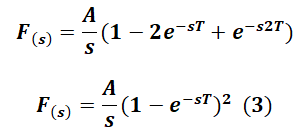
Al aplicar el mismo procedimiento vemos que:
Por lo tanto, la transformada de Laplace la función de la Figura es como en la ecuación (3):
Gráfica en Matlab
En la ecuación anterior considere T=1, A=3. Es decir, dos pulsos rectangulares de ancho 1 y amplitud 3, que inicia en t=0. El siguiente script permite obtener la gráfica de f(t) en Matlab:
Ejemplo 3.
El siguiente código simula un pulso rectangular con un ancho de pulso deseado y el gráfico resultante:
fs=500; %sampling frequency T=0.2; %width of the rectangular pulse in seconds t=0.5:1/fs:0.5; %time base g=(t>-T/2).(t(t==T/2)+0.5(t==-T/2); g=(t>-T/2).(t<T/2)+0.5(t==T/2)+0.5(t==-T/2); %rectpuls(t,T); %using inbuilt function (signal proc toolbox) plot(t,g); title([‘Pulso Rectangular de ancho=’,num2str(T),’s’])
La forma estándar de la función de transferencia de un sistema de 2do orden es:
Dónde:
Nota: Si el sistema responde al escalón unitario (step response), podemos suponer k=1en la ecuación (1). En comparación con la simplicidad de un sistema de primer orden (Sistemas de primer orden), un sistema de segundo orden exhibe una amplia gama de respuestas que deben analizarse y describirse. Mientras que variar el parámetro de un sistema de primer orden (constante de tiempo) simplemente cambia la velocidad de la respuesta, los cambios en los parámetros de un sistema de segundo orden pueden cambiar la forma total de la respuesta.
La función de transferencia estándar (1) para un sistema de 2do orden está expresamente diseñada en función de estos parámetros (ganancia, frecuencia natural y coeficiente de amortiguamiento) que están ligados al comportamiento físico de la respuesta y a la situación de sus polos en el plano “s”. Para empezar, con solo conocer el valor del coeficiente de amortiguamiento ζ, podemos determinar la forma de la respuesta del sistema, y el tipo de sistema.
Recordamos que el método más utilizado para estudiar el comportamiento de los sistemas de 2do orden consiste en someter dicho sistema a un conjunto de entradas típicas: el impulso, el escalón unitario, la rampa y una señal alterna sinusoidal (ver Anexo 1).
Tipos de sistemas de segundo orden
Subamortiguado (0<ζ<1)
Críticamente amortiguado (ζ=1)
Sobreamortiguado (1<ζ)
Oscilatorio (ζ=0)
Inestable (ζ<0)
La siguiente figura es un resumen del tipo de sistema y la forma de la salida del sistema para una entrada escalón unitario, de acuerdo al valor del coeficiente de amortiguamiento:
Vamos a describir cada uno de estos tipos de sistemas por separado. En primer lugar, el más interesante en cuanto al diseño de sistemas de control: sistema de 2do orden sub-amortiguado.
Sistema de 2do orden Sub-amortiguado
Un sistema de segundo orden sub-amortiguado es aquel cuyo coeficiente de amortiguamiento tiene valores entre cero y uno (0<ζ<1). Una característica importante es que tiene dos polos complejos conjugados (como se puede ver en el plano s de la Figura siguiente). Este sistema, sometido a una entrada escalón unitario, presenta el siguiente comportamiento genérico:
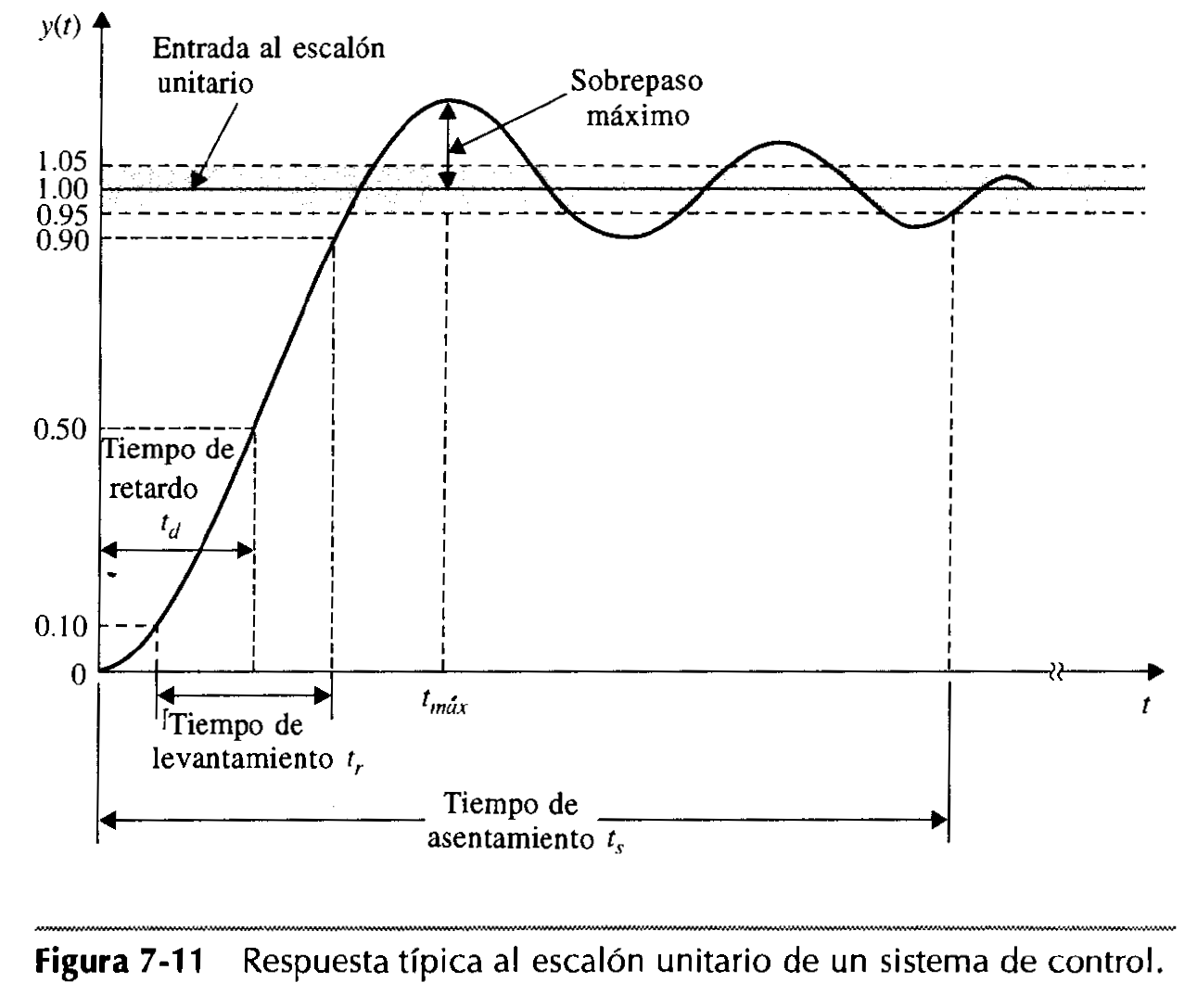
La Figura anterior muestra los factores que se suman y se multiplican para generar la salida c(t) (interesante recordar que es la respuesta al escalón unitario del sistema de segundo orden subamortiguado). La salida es oscilatoria amortiguada. La frecuencia de dicha señal oscilatoria es ahora ωd (frecuencia amortiguada). La oscilación está amortiguada por el término exponencial decreciente. Este sistema, sea eléctrico, mecánico, hidráulico, neumático, es muy cotizado porque permite variar totalmente la forma de la respuesta (ver los 5 parámetros siguientes), y sigue a la entrada (su valor final es igual al de la entrada, que en este caso es 1).
Este comportamiento también se puede describir analíticamente mediante los parámetros que se definen a continuación:
Sobrepaso máximo (Mp): es el valor pico máximo de la curva de respuesta medida a partir de la unidad. Según otra bibliografía, es también la cantidad en que la forma de la curva de salida sobrepasa el valor final de la salida, expresada en porcentaje.
Tiempo de retardo (Td): es el tiempo requerido para que la respuesta del sistema alcance la mitad del valor final por primera vez.
Tiempo de asentamiento (Ts): es el tiempo requerido para que las oscilaciones amortiguadas transitorias alcancen y permanezcan dentro del ±2% o del ±5% del valor final o valor en estado estable.
Tiempo de levantamiento (Tr): es el tiempo requerido para que la respuesta del sistema pase del 10% al 90% del valor final. En otras palabras, para que vaya de 0.1 del valor final al 0.9 del valor final.
Tiempo pico (Tpó Tmáx):es el tiempo requerido para que la respuesta del sistema alcance el pico del levantamiento máximo.
Por lo general, los requerimientos para el diseño de un sistema de control se especifican en base a estos parámetros (de allí su importancia). Como se puede constatar, se manifiestan durante la respuesta transitoria en la cual la mayoría de los sistemas muestra una conducta oscilatoria antes de alcanzar el estado estable. Para poder comparar varios diseños, se utiliza como función de prueba el escalón unitario, y es práctica común considerar las condiciones iniciales iguales a cero.
Fórmulas para los parámetros de un Sistema de 2do orden Sub-amortiguado
A continuación se presentan fórmulas que pueden ayudar a determinar analíticamente los parámetros de un sistema de segundo orden sub-amortiguado para el que se conoce la forma estándar de la función de transferencia, ecuación (1).
Sobrepaso máximo (Mp):
también podemos utilizar:
donde y(t(p)) es el valor de la salida en el tiempo de máximo sobrepaso, mientras y(∞) es el valor de la salida en estado estable, cuando desaparece la respuesta transitoria.
Es muy útil contar además con la expresión para el factor de amortiguamiento relativo ζ en función del sobrepaso Mp:
Tiempo de asentamiento (Ts)
Tiempo de levantamiento (Tr)
El tiempo de levantamiento no se puede expresar en función del factor de amortiguamiento relativo ζ. Se puede utilizar la siguiente relación para la cual es necesario contar con los componentes real e imaginario de la raíz que se corresponde con los valores dados de ωny ζ (Figura 5-9):
donde σ es el factor de decorecimiento y ωd es la frecuencia natural amortiguada:
y ß está definida por la Figura siguiente:
Tiempo pico (Tp)
Tiempo de retardo (Td)
La respuesta transitoria de un sistema de control en la práctica siempre exhibe oscilaciones amortiguadas antes de alcanzar el estado estable. Esto ocurre porque los sistemas tienen componentes que almacenan energía y no pueden responder de manera inmediata a los cambios en la entrada. La respuesta transitoria a una entrada escalón depende de las condiciones iniciales. Es por ello que en la práctica se acostumbra considerar que el sistema está inicialmente en reposo de modo tal que las condiciones iniciales (la salida y sus derivadas) son iguales a cero.
Mientras que variar el parámetro de un Sistema de primer orden(constante de tiempo) simplemente cambia la velocidad de la respuesta, los cambios en los parámetros de un sistema de segundo orden pueden cambiar la forma total de la respuesta.