

Obtener la representación en espacio de estados de y(t) a partir de la función de transferencia Y(s)/U(s):
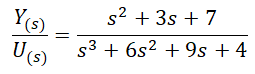
HallaPara obtener la representación en espacios de estados del sistema utilizamos la expresión para Y(s)/U(s) de la siguiente manera:
Representamos este sistema mediante el siguiente diagrama de bloques:

Dónde:

Al aplicar la antitransformada de Laplace obtenemos:

Asignamos las siguientes variables de estado:

Sustituimos:

Además vemos que:

De esta manera, la primera parte de la representación en espacios de estados del sistema es:

Para determinar el resto de la representación tomamos en cuenta que:

Al aplicar la antitransformada de Laplace obtenemos que:

Al sustituir las variables de estado ya definidas obtenemos que:
 Por lo tanto, la salida y(t) a partir del espacio de estados es:
Por lo tanto, la salida y(t) a partir del espacio de estados es:

2. Graficar y(t) en Matlab y explicar a partir de la gráfica la estabilidad del sistema.
Para graficar y(t) para una entrada escalón unitario utilizamos la función de transferencia y el siguiente comando en Matlab:
>> sys=tf([1 3 7],[1 6 9 4]);
>> step(sys)
Así obtenemos:

En la gráfica anterior podemos ver claramente que el estado final del sistema es estable, ya que el valor de la salida y(t) se estabiliza en:

El valor final, o valor en estado estable, para y(t), y el tiempo de establecimiento en t=5.76 s, se pueden comprobar en la gráfica siguiente:

Además se le puede preguntar a la cónsola de Matlab si el sistema es estable mediante el siguiente comando (el número 1 significa verdadero):
>> isstable(sys)
ans = 1
SIGUIENTE:
ADEMÁS:
- La Transformada de Laplace
- Transformada de Laplace del Pulso Rectangular
- La Transformada Z
- La antitransformada de Laplace
- Ejemplo de antitransformada de Laplace
- Ejemplo 1: Transformada de Laplace de una función exponencial – Matlab
- La Función de Transferencia
- La respuesta al impulso, la salida y la integral de convolución de un sist. LIT
- Convolución de señales discretas – Sumatoria de convolución
- Convolución en el tiempo continuo – Ejemplos
- Convolución de un señal con su respuesta al impulso – Ejemplo en Matlab
- Método gráfico de convolución de señales continuas
- Sistemas lineales e invariantes en el tiempo
Escrito por Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer – Twitter: @dademuch
Se hacen trabajos, ejercicios, clases online, talleres, laboratorios, Academic Paper, Tesis, Monografías….Entrega Inmediata !!!…Comunícate conmigo a través de:
- WhatsApp: +34 633129287
- dademuchconnection@gmail.com
Te brindo toda la asesoría que necesites!! …
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: Jaén – España: Tlf. 633129287
Caracas, Quito, Guayaquil, Lima, México, Bogotá, Cochabamba, Santiago.
WhatsApp: +34 633129287
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com


 Respuesta:
Respuesta: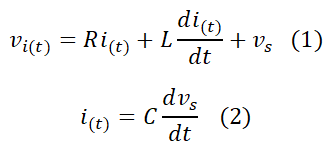

































 2. Hallar la función de transferencia θL(s) / Ei(s) del Sistema Motor-Carga mostrado en la Figura 2.
2. Hallar la función de transferencia θL(s) / Ei(s) del Sistema Motor-Carga mostrado en la Figura 2.
 3.
3.  5. Hallar la función de transferencia θL(s) / θr(s) del Sistema Motor-Carga mostrado en la Figura 4.
5. Hallar la función de transferencia θL(s) / θr(s) del Sistema Motor-Carga mostrado en la Figura 4.
 6.
6.  7. Hallar
7. Hallar 8.
8. 

 10.
10.  11.
11.  Contacto a través de:
Contacto a través de:


 2. Variables de estado
Definición:
2. Variables de estado
Definición:

 Debemos hallar la expresión en términos de las variables de estado para
Debemos hallar la expresión en términos de las variables de estado para  Despejamos
Despejamos  Utilizando la definición de variables de estado:
Utilizando la definición de variables de estado: Igualmente despejamos
Igualmente despejamos  Utilizando la definición de variables de estado:
Utilizando la definición de variables de estado:
 Si la salida del sistema es x2(t), y la entrada es f(t), utilizando las ecuaciones (1), (2) (3) y (4), la representación matricial del sistema es:
Si la salida del sistema es x2(t), y la entrada es f(t), utilizando las ecuaciones (1), (2) (3) y (4), la representación matricial del sistema es:

 3. Función de Transferencia
La representación matricial del sistema tiene la forma:
3. Función de Transferencia
La representación matricial del sistema tiene la forma: Dónde:
Dónde:

 De la teoría de sistemas de control se extrae que:
De la teoría de sistemas de control se extrae que:
 En este caso:
En este caso:
 Donde I es la matriz identidad y s es la variable compleja utilizada en la transformada de Laplace.
Buscando ayuda en Matlab:
>> s=sym(‘s’);
…..
>> k3=sym(‘k3’) // declarar todas las variables
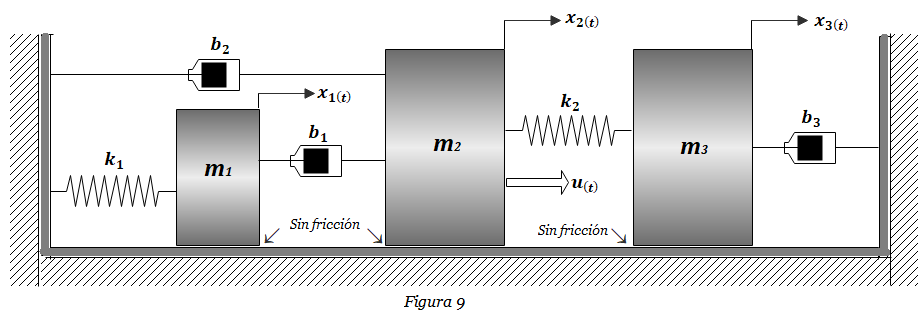
>> sIA= [s -1 0 0;(k1+k2)/m1 s+(fv1+fv3)/m1 -k2/m1 -fv3/m1;0 0 s -1;-k2/m2 -fv3/m2 (k2+k3)/m2 s+(fv2+fv3)/m2]
>> C=[0 0 1 0]
>> B= [0;1/m1;0;0]
>> V=(sI-A)^-1
>> G=C*V*B
G = (k2 + fv3*s)/(k1*k2 + k1*k3 + k2*k3 + fv1*m2*s^3 + fv2*m1*s^3 + fv3*m1*s^3 + fv3*m2*s^3 + k1*m2*s^2 + k2*m1*s^2 + k2*m2*s^2 + k3*m1*s^2 + m1*m2*s^4 + fv1*k2*s + fv2*k1*s + fv1*k3*s + fv2*k2*s + fv3*k1*s + fv3*k3*s + fv1*fv2*s^2 + fv1*fv3*s^2 + fv2*fv3*s^2)
Dónde:
Donde I es la matriz identidad y s es la variable compleja utilizada en la transformada de Laplace.
Buscando ayuda en Matlab:
>> s=sym(‘s’);
…..
>> k3=sym(‘k3’) // declarar todas las variables
>> sIA= [s -1 0 0;(k1+k2)/m1 s+(fv1+fv3)/m1 -k2/m1 -fv3/m1;0 0 s -1;-k2/m2 -fv3/m2 (k2+k3)/m2 s+(fv2+fv3)/m2]
>> C=[0 0 1 0]
>> B= [0;1/m1;0;0]
>> V=(sI-A)^-1
>> G=C*V*B
G = (k2 + fv3*s)/(k1*k2 + k1*k3 + k2*k3 + fv1*m2*s^3 + fv2*m1*s^3 + fv3*m1*s^3 + fv3*m2*s^3 + k1*m2*s^2 + k2*m1*s^2 + k2*m2*s^2 + k3*m1*s^2 + m1*m2*s^4 + fv1*k2*s + fv2*k1*s + fv1*k3*s + fv2*k2*s + fv3*k1*s + fv3*k3*s + fv1*fv2*s^2 + fv1*fv3*s^2 + fv2*fv3*s^2)
Dónde: Definimos el determinante como:
Definimos el determinante como:
 Por lo tanto:
Por lo tanto:
 Para revisar la teoría sobre Variables de Estado ver:
Para revisar la teoría sobre Variables de Estado ver: 
 El diagrama de bloques para representar esta operación es:
El diagrama de bloques para representar esta operación es: En cuanto a las variables de estado definidas en este ejercicio, el diagrama de bloques anterior es equivalente a:
En cuanto a las variables de estado definidas en este ejercicio, el diagrama de bloques anterior es equivalente a: Luego, deducimos que:
Luego, deducimos que:






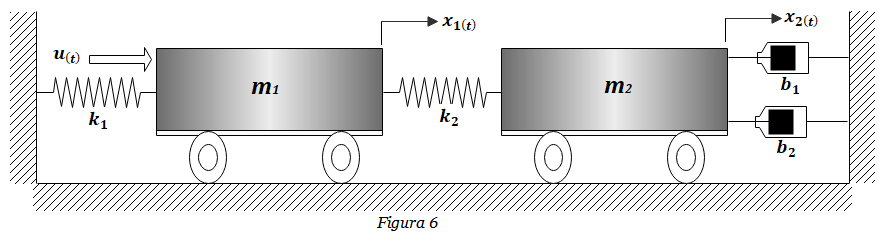
 Dónde m1 es la masa del punto 1 donde se concentra la fuerza del remolque, por ello se considera de masa=0. De allí obtenemos la ecuación (1) del sistema:
Dónde m1 es la masa del punto 1 donde se concentra la fuerza del remolque, por ello se considera de masa=0. De allí obtenemos la ecuación (1) del sistema:
 Por otra parte:
Por otra parte: Dónde m es la masa del remolque. De aquí obtenemos la ecuación (2) del sistema:
Dónde m es la masa del remolque. De aquí obtenemos la ecuación (2) del sistema:
 Se han formulado las ecuaciones en este orden con el fin de facilitar la determinación de las variables de estado y el arreglo matricial que permita encontrar rápidamente la función de transferencia del sistema. Para mayor información teórica sobre este tema ver:
Se han formulado las ecuaciones en este orden con el fin de facilitar la determinación de las variables de estado y el arreglo matricial que permita encontrar rápidamente la función de transferencia del sistema. Para mayor información teórica sobre este tema ver:  El siguiente paso consiste en encontrar
El siguiente paso consiste en encontrar  Utilizamos las ecuaciones (1) y (2) para sustituir, despejar y completar estas últimas relaciones:
Utilizamos las ecuaciones (1) y (2) para sustituir, despejar y completar estas últimas relaciones:
 Si la salida del sistema es x2(t), la entrada es f(t), y debemos obtener la función de transferencia X2(s)/F(s), lo más práctico es utilizar dx2(t)/dt como salida (ya que la tenemos de una vez despejada en la definición de variables de estado) y luego despejar X2(s). Es decir, calculamos la velocidad y luego integramos para hallar el desplazamiento, aprovechando el hecho de que el resultado que obtendremos estará expresado en el dominio de la frecuencia, y en ese caso la integración es una simple operación algebraica, tal como lo muestra la siguiente figura:
Si la salida del sistema es x2(t), la entrada es f(t), y debemos obtener la función de transferencia X2(s)/F(s), lo más práctico es utilizar dx2(t)/dt como salida (ya que la tenemos de una vez despejada en la definición de variables de estado) y luego despejar X2(s). Es decir, calculamos la velocidad y luego integramos para hallar el desplazamiento, aprovechando el hecho de que el resultado que obtendremos estará expresado en el dominio de la frecuencia, y en ese caso la integración es una simple operación algebraica, tal como lo muestra la siguiente figura: 3. Transformar la Representación Matricial en Función de Transferencia
La anterior representación matricial del sistema tiene la forma:
3. Transformar la Representación Matricial en Función de Transferencia
La anterior representación matricial del sistema tiene la forma: Dónde:
Dónde:

 De la teoría de sistemas de control se extrae que:
De la teoría de sistemas de control se extrae que: Donde I es la matriz identidad y s es la variable compleja utilizada en la transformada de Laplace. Entonces:
Donde I es la matriz identidad y s es la variable compleja utilizada en la transformada de Laplace. Entonces: Buscando ayuda en Matlab:
>> s=sym(‘s’)
>>Kh=sym(‘Kh’)
…… // declarar todas las variables
>> sIA= [s+(Kh/Bh) 0;0 s+(Bt/m)]
>> C=[0 1]
>> B= [1/Bh;1/m]
>> V=(sIA)^-1
>> G=C*V*B
G = 1/(Bt + m*s)
Por tanto:
Buscando ayuda en Matlab:
>> s=sym(‘s’)
>>Kh=sym(‘Kh’)
…… // declarar todas las variables
>> sIA= [s+(Kh/Bh) 0;0 s+(Bt/m)]
>> C=[0 1]
>> B= [1/Bh;1/m]
>> V=(sIA)^-1
>> G=C*V*B
G = 1/(Bt + m*s)
Por tanto: Se confirma que:
Se confirma que:
 Para revisar la teoría sobre Variables de Estado ver:
Para revisar la teoría sobre Variables de Estado ver: 












