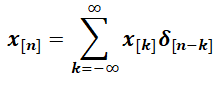
En general, cualquier señal discreta x[n] puede ser representada como una combinación lineal de deltas desplazadas. En general se cumple que:
Ejemplo:
Sea la función x[n] representada por la siguiente gráfica:
La función x[n] de la gráfica anterior puede ser representada mediante la siguiente sumatoria:
A continuación se observa cada una de las gráficas que se suman para formar x[n]:
Suma de convolución
En el ejemplo anterior se ve claramente la importancia de las propiedades de muestreo y selección definidas anteriormente para la función impulso unitario (El Impulso Unitario). Su importancia reside en el hecho de que x[n] se puede representar como una superposición de versiones escaladas de un conjunto muy sencillo de funciones elementales, es decir, de impulsos unitarios δ[n-k] desplazados. A partir de este simple hecho vamos a presentar ahora uno de los conceptos más importante del análisis de sistemas lineales, la idea de la sumatoria de convolución.
Decíamos antes que cualquier señal discreta x[n] puede representarse como una combinación lineal de deltas desplazadas:
Supongamos ahora que x[n] representa toda entrada para un arbitrario Sistema A cuya salida es y[n]. Recordemos del párrafo anterior que en realidad x[n] es una suma de versiones escaladas (con peso x[k]) de impulsos unitarios δ[n-k] desplazados.
Designemos a hk[n] como la respuesta del sistema al impulso unitario desplazado δ[n-k]. Debido a que el sistema es un LTI (cumple con la propiedad de linealidad y de invarianza en el tiempo) podemos expresar matemáticamente la salida y[n] del Sistema A como una sumatoria de las respuestas individuales del sistema a cada impulso unitarios δ[n-k] con peso x[k]:
Entonces, de acuerdo con la ecuación anterior, si conocemos la respuesta de un sistema lineal al conjunto de impulsos unitarios desplazados, podemos construir la respuesta a cualquier entrada arbitraria. Debido a que δ[n-k] es la versión desplazada de δ[n], así hk[n] es una versión desplazada de su versión en el origen h0[n]. Por lo tanto:
Por convención científica se obvia el subíndice en h0[n] y se deja simplemente como h[n]. De esta manera, la salida y[n] del Sistema A se puede expresar como:
Este importante resultado se conoce como suma de convolución, y el miembro derecho de la ecuación se conoce como convolución de las secuencias x[n] y h[n].
Para la convolución de las secuencias x[n] y h[n] se utiliza el signo *. De esta manera, la salida y[n] del Sistema A se puede expresar como:
Dónde:
La Figura siguiente presenta un resumen de los resultados obtenidos hasta ahora:
ANEXO
Let hk[n] be the response of the system to δ[n-k], an impulse occurring at n=k. Then:
From the principle of superposition in linearity, we can write:
According to equation 2.51, the system response to any input can be expressed in terms of the responses of the system to the sequences δ[n-k]. If only linearity is imposed, hk[n] depends on both n and k, in which case the computational usefulness of equation 2.51 is limited. We obtain a more useful result if we impose the additional constraint of time invariance.
The property of time invariance implies that if h[n] is the response to δ[n], the response to δ[n-k] is h[n-k]. With this additional constraint, equation 2.51 becomes:
As a consequence of equation 2.52, a linear-time invariant system (which we will sometimes abbreviate as LTI) is completely characterized by it impulse response h[n] in the sense that, given h[n], it is possible to use equation 2.52 to compute the output y[n] due to any input x[n]. Equation 2.52 is commonly called the convolution sum, and is represented by:
Source: Discrete-Time Signal Processing (Alan Oppenheim pp 22-23)
La aplicación de este resultado lo podemos ver gráficamente mediante el siguiente ejemplo.
Ejemplo 1:
Ejemplo 2:
Sean la entrada x[n] a un sistema y su repuesta al impulso h[n], tal como se especifica a continuación:
Determinar la salida y[n] del sistema.
Respuesta:
Pasos para aplicar la sumatoria de convolución
Repetimos este importante hallazgo, la salida y[n] de cualquier sistema LTI de tiempo discreto se puede obtener mediante la convolución de la entrada x[n] con la respuesta al impulso h[n]. Es lo que manifiesta el siguiente esquema:
La suma de convolución anterior involucra los siguientes pasos:
- La respuesta al impulso h[k] se invierte en el tiempo (es decir, se refleja sobre el origen) para obtener h[-k] y posteriormente se desplaza mediante n para formar h[n-k] = h[-(k-n)], que es una función de k con parámetro n;
- Las dos secuencias x[k] y h[n-k] se multiplican entre sí para todos los valores de k con n fija en algún valor;
- El producto x[k]h[n-k] se suma sobre todas las k para producir una sola muestra de salida y[n];
- Los pasos 1 a 3 se repiten a medida que n varía en el intervalo de –infinito a +infinito para producir la salida completa y[n].
Ejemplo 1:
La entrada x[n] y la respuesta al impulso h[n] de un sistema LTI están dadas por:
Calcule la salida y[n] mediante:
Respuesta:
Las secuencias para x[k] y h[n-k], y el resultado de la multiplicación y posterior suma, se observan a continuación:
Propiedades de la convolución.
Las siguientes propiedades de la suma de convolución son análogas a las de la integral de convolución:
Otras propiedades de interés son:
También la solución a cierto problema se puede determinar de manera analítica, utilizando las propiedades de la convolución señaladas anteriormente. Tal es el caso del siguiente ejemplo.
Ejemplo 2:
Ante una entrada x[n], la respuesta y[n] de un sistema LTI es:
Se conoce que la respuesta al impulso h[n] del sistema:
Determinar x[n]. Seleccionar la respuesta correcta de las siguientes alternativas:
Respuesta:
Nuestra estrategia será utilizar las siguientes propiedades:
Expresamos la respuesta al impulso en términos de deltas de Dirac desplazados:
Luego, si seleccionamos:
Entonces:
Podríamos demostrar gráficamente que la anterior ecuación coincide con la gráfica para y[n] dada en el enunciado. Por lo tanto, la opción correcta es la letra a).
Respuesta al escalón.
La respuesta y[n] al escalón u[n] de un sistema LTI de tiempo discreto cuya respuesta al impulso es h[n], se obtiene fácilmente mediante:
Notar que, de acuerdo con la ecuación anterior:
Notar la estrecha relación que tiene este resultado con el hecho demostrado en El Impulso Unitario de que:
Es decir, podemos conocer la respuesta al impulso de un sistema LTI discreto, a partir de su respuesta a la función escalón, mediante:
SIGUIENTE……..Convolución de señales discretas en Matlab
Relacionado:
Te puede interesar:
Fuentes:
- Fundamentos_de_Señales_y_Sistemas_usando la Web y Matlab
- Análisis de sistemas lineales asistido con Scilab, Ebert Brea.
- Analisis_de_Sistemas_Lineales
- Oppenheim – Señales y Sistemas
- Señales y sistemas – Shaum
Revisión literaria hecha por:
Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
Se hacen trabajos, se resuelven ejercicios!!
WhatsApp: +34633129287 Atención Inmediata!!
Twitter: @dademuch
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34633129287
Caracas, Quito, Guayaquil, Jaén.
WhatsApp: +34633129287
Twitter: @dademuch
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com