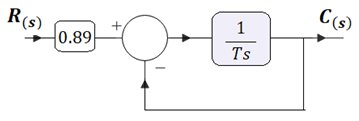
Dado el sistema de la siguiente figura, aplicar las siguientes señales de entrada: Escalón unitario, Rampa unitaria y Escalón de amplitud factor*2:

Se consideran las dos plantas siguientes:

Se pide: 1) Observar la respuesta temporal simulada durante 20 segundos para cada sistema y para cada entrada. 2) Obtener gráficamente el valor del error que presenta la respuesta cada sistema al cabo de 10 segundos. 3) Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
- Incluir un controlador proporcional, esto es, una ganancia (bloque Gain) en el diagrama. Dar el valor 10 a la ganancia y obtener de nuevo su respuesta ante las entradas utilizadas en el apartado anterior.
- De forma análoga, obtener gráficamente el valor del error que presenta la respuesta del sistema al cabo de 10 segundos. Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
- El sistema con la función de transferencia 1 se prueba con dos controladores: un P con ganancia proporcional 0.7 y un PI con la misma ganancia proporcional y con ganancia integral 10. Observar la respuesta obtenida ante un escalón unitario para el sistema sin controlador, para el sistema con el controlador P y para el que tiene el PI.
- Buscar una posible modificación en las ganancias de ambos controladores para mejorar la respuesta.
Respuesta:
Antes de simular la respuesta a las diferentes señales, definimos en Matlab las funciones de transferencia de cada planta mediante:
>> G1=tf([1],[1 1]);
>> G2=tf([1],[1 1 0]);
Estos comandos arrojan el siguiente resultado:

Definimos los sistemas de realimentación unitaria para cada una de las plantas:
>> sys1=feedback(G1,1);
>> sys2=feedback(G2,1);

Entrada Escalón unitario: Con la función step() simulamos la respuesta al escalón unitario de cada sistema de realimentación definido, durante 20 segundos:
>> step(sys1)

Gráfica 1
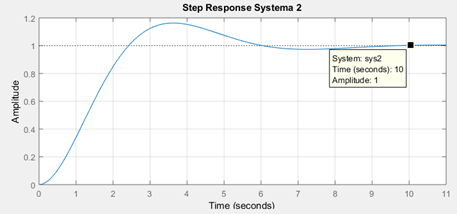
>> step(sys2)

Gráfica 2
Mediante estas gráficas podemos calcular el valor del error que presenta la respuesta de cada sistema a la entrada escalón al cabo de 10 segundos. Comenzamos con sys1:

Gráfica 3
En la gráfica 3 podemos observar que la salida del sistema de realimentación 1, el cual involucra a G1(s), a los 10 segundos es igual a 0.5. Por lo tanto el error, e1(t) de este sistema a la entrada escalón cuando t=10s, es:

También se observa en la gráfica 3 que a los 10s el sistema 1 ha alcanzado su estado estable. Esto lo podemos corroborar mediante el comando stepinfo():

Por lo que el error a la entrada escalón unitario a los 10 segundos es igual al error e1step(∞) del sistema a la entrada escalón en estado estable:

En consecuencia, se puede calcular analíticamente este error utilizando la constante de posición Kp:

El error en estado estable e1step(∞) del sistema 1 a la entrada escalón unitario es:

Aplicamos este mismo procedimiento para calcular el valor del error que presenta la respuesta del sys2 a la entrada escalón unitario al cabo de 10 segundos:
Gráfica 4
En la gráfica 4 podemos observar que la salida del sistema de realimentación 2, el cual involucra a G2(s), a los 10 segundos es igual a 1. Por lo tanto el error, e2(t) de este sistema a la entrada escalón cuando t=10s, es:

Se observa en la gráfica 4 que a los 10s el sistema 2 ha alcanzado su estado estable.

Por lo que el error a la entrada escalón unitario a los 10 segundos es igual al error e2step(∞) del sistema a la entrada escalón en estado estable:

En consecuencia, se puede calcular analíticamente este error utilizando la constante de posición Kp:

El error en estado estable e2step(∞) del sistema 2 a la entrada escalón unitario es:

Entrada Rampa unitaria:
Para evaluar la respuesta de cada sistema a la rampa unitaria debemos en primer lugar definir la función rampa unitaria mediante:
>> t=0:0.01:21;
>> x=t;
>> lsim(sys1,x,t)
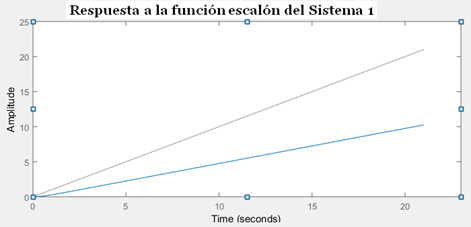
Gráfica 5 (la salida del sistema 1 en azul)
>> lsim(sys2,x,t)

Gráfica 6 (la salida del sistema 2 en azul)
Aplicamos el mismo procedimiento para calcular el valor del error que presenta la respuesta del sys1 a la entrada rampa al cabo de 10 segundos:

Gráfica 7 (la salida del sistema 1 en azul)
En la gráfica 7 podemos observar que la salida del sistema de realimentación 1, a los 10 segundos es igual a 4.75. Por lo tanto el error e1(t) de este sistema a la entrada rampa cuando t=10s, es:

El error e1rampa(∞) del sistema 1 a la entrada rampa, se puede calcular analíticamente utilizando la constante de posición Kv:

El error en estado estable e1ramp(∞) del sistema 1 a la entrada rampa es:

Si vemos la gráfica 7 podemos ver que la entrada crece indefinidamente, y también crece infinitamente la separación con la salida del sistema. Por eso el error en estado estable del sistema 1 a la entrada rampa es infinito.
Para el sys2 al cabo de 10 segundos:

Gráfica 8 (la salida del sistema 2 en azul)
En la gráfica 8 podemos observar que la salida del sistema de realimentación 2, a los 10 segundos es igual a 9. Por lo tanto el error e2(t) de este sistema a la entrada rampa cuando t=10s, es:

El error e2rampa(∞) del sistema 2 a la entrada rampa, se puede calcular analíticamente utilizando la constante de posición Kv:

El error en estado estable e2ramp(∞) del sistema 2 a la entrada rampa es:

Si vemos la gráfica 8 podemos ver que ambas señales, entrada y salida, crecen en paralelo indefinidamente, con una diferencia constante de 1. En conclusión, el error en estado estable del sistema 2 a la entrada rampa es igual a 1.
Escalón de amplitud factor*2:
Utilizamos el factor=0.7
Por tanto, el escalón tendrá una amplitud de 1.4
Para evaluar la respuesta de cada sistema al escalón de amplitud 1.4 simplemente multiplicamos cada sistema por 1.4 y evaluamos la respuesta para el escalón unitario. A cada sistema nombramos 1.1 y 2.2 respectivamente. Entonces:
>> sys11= 1.4*sys1
>> sys22=1.4* sys2;

Procedemos a graficar los sistemas anteriormente definidos:
>> step(sys11)

Gráfica 9
>> step(sys22)

Gráfica 10
Aplicamos el procedimiento para calcular el valor del error que presenta la respuesta del sys1.1 a la entrada escalón de amplitud 1.4 al cabo de 10 segundos:

Gráfica 11
En la gráfica 11 podemos observar que la salida del sistema 1.1, a los 10 segundos es igual a 0.7. Por lo tanto el error, e1.1(t) de este sistema a la entrada escalón con amplitud 1.4 cuando t=10s, es:

Utilizando el principio de superposición, podemos calcular el error a la entrada escalón utilizando la constante de posición Kp y sumando 0.4 a la expresión para e1.1step(∞):

Dónde:

Nota: se determinó Geq mediante la regla siguiente:

Por tanto:

Se confirma que el error en estado estable del sistema 1.1 a la entrada escalón con amplitud 1.4 es:

Aplicamos el procedimiento para calcular el valor del error que presenta la respuesta del sys2.2 a la entrada escalón al cabo de 10 segundos:

Gráfica 12
En la gráfica 12 podemos observar que la salida del sistema 2.2, a los 10 segundos es igual a 1.4. Por lo tanto el error, e2.2(t) de este sistema a la entrada escalón con amplitud 1.4 cuando t=10s, es:

Se puede calcular el error a la entrada escalón utilizando la constante de posición Kp:
 Dónde:
Dónde:

Por tanto:

Se confirma que el error en estado estable del sistema 2.2 a la entrada escalón con amplitud 1.4 es:

2DA PARTE
- Incluir un controlador proporcional, esto es, una ganancia (bloque Gain) en el diagrama. Dar el valor 10 a la ganancia y obtener de nuevo su respuesta ante las entradas utilizadas en el apartado anterior.
- De forma análoga, obtener gráficamente el valor del error que presenta la respuesta del sistema al cabo de 10 segundos. Calcular la expresión analítica de dicho error en estado estacionario para cada una de las señales de entrada.
Respuesta: Error Est Estable 2da parte
3RA PARTE
6. El sistema con la función de transferencia 1 se prueba con dos controladores: un P con ganancia proporcional 0.7 y un PI con la misma ganancia proporcional y con ganancia integral 10. Observar la respuesta obtenida ante un escalón unitario para el sistema sin controlador, para el sistema con el controlador P y para el que tiene el PI.
7. Buscar una posible modificación en las ganancias de ambos controladores para mejorar la respuesta.
Respuesta: Error Est Estable 3ra parte
Fuentes:
- Control Systems Engineering, Nise
- Sistemas de Control Automatico Benjamin C Kuo
- Modern_Control_Engineering, Ogata 4t
Te puede interesar también:
- Diagrama de Bloques – Ingeniería de Control
- Diagrama de bloques – Problemas resueltos – Sistema MRA – Catálogo 8
- La función de transferencia a partir de la gráfica – Respuesta escalón
- Ejercicio de diagrama de bloques a partir de la Transformada de Laplace
- Ejercicio de Diagrama de bloques a partir de representación en variables de estado
- Representación de un sistema en variables de estado
- Ejercicio de Función de Transferencia a partir de representación en Variables de Estado
- Convertir la Función de Transferencia en Variables de Estado (English version)
- Respuesta Transitoria de un Sistema de Control
- Análisis de respuesta transitoria – Problemas resueltos – Catálogo 9
- Salida de un sistema de control en Estado Estable
- Simulación de Respuesta Transitoria con Matlab
- Respuesta transitoria de un sistema de control Prototipo
- Servomotores – Respuesta transitoria de un sistema de control de posición
Escrito por: Larry Francis Obando – Technical Specialist – Educational Content Writer.
WhatsApp: +34633129287 Atención Inmediata!!
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34 633129287
Caracas, Quito, Guayaquil, Cuenca
WhatsApp: +34633129287
email: dademuchconnection@gmail.com










 Es decir:
Es decir:




 De donde:
De donde:










 La salida es vo(t):
La salida es vo(t):















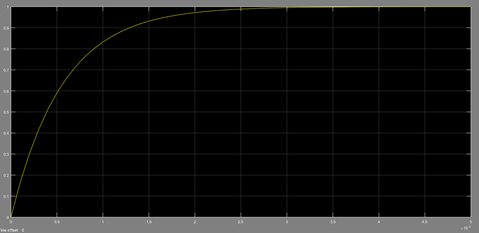 Gráfica 2
Gráfica 2

































 Por lo tanto, la salida y(t) a partir del espacio de estados es:
Por lo tanto, la salida y(t) a partir del espacio de estados es:





 Dónde:
Dónde: Por lo tanto:
Por lo tanto:
 Por lo tanto:
Por lo tanto: De esta manera, Y(s)/U(s) se puede escribir como:
De esta manera, Y(s)/U(s) se puede escribir como:








")
")
")
")
")
")
")
")
")
")
")
")
")
")


 Respuesta:
Respuesta: