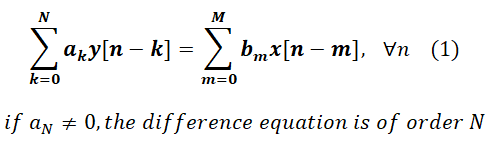
Sea S un sistema LTI (lineal e invariante en el tiempo) analógico cualquier y sea h(t) su respuesta impulsiva. Considérese que la señal de entrada de S es una señal exponencial compleja de la forma siguiente:

Allí donde s0 es una constante compleja (s0 ∈ complejos)
Al calcular la señal de salida de S como resultado de la convolución entre x(t) y h(t), se observa lo siguiente:

En consecuencia:

Allí donde, independientemente de si h(t) es una señal real o compleja, H(s0) es un valor constante (no depende de t) y, en general, complejo (puesto que s0 ∈ complejos).
Así pues se observa que la salida de un sistema LTI analógico cualquier ante cualquier señal exponencial compleja de la forma expresada en la ecuación (1) es igual a esa misma señal exponencial compleja multiplicada por una constante. En concreto, por la señal denominada en la ecuación (2). Se observa además que dicha constante depende únicamente de h(t) (la respuesta impulsiva del sistema) y del valor de s0.
En este punto enunciamos el teorema de las autofunciones de los sistemas LTI analógicos:

En primer lugar conviene notar que la constante s0 tiene parte real y parte imaginaria:

Por lo tanto, vemos que las autofunciones de los sistema LTI analógicos pueden ser vistas como el resultado del producto de una señal exponencial real y una señal exponencial compleja:

Allí donde, σ0 y Ω0 son constantes reales (
σ0 y Ω0 ∈ ℜ)
Y en segundo lugar, puesto que todo sistema LTI es, por definición, lineal e invariante en el tiempo, ya podemos extraer la consecuencia más inmediata, pero de enorme importancia, del teorema de las autofunciones. Sea una combinación lineal arbitraria de M exponenciales complejas:

La salida de cualquier sistema LTI analógico S ante una entrada de la forma expresada en la ecuación anterior, es otra combinación lineal de las mismas exponenciales complejas:

Donde H(sk) se calcula a partir de h(t), la respuesta impulsiva de S, del siguiente modo:

A continuación se ilustra la utilidad práctica de las autofunciones.
Ejemplo 1
Sea S un sistema LTI analógico y sea h(t) su respuesta impulsiva:

Se pide calcular la salida del sistema S ante la siguiente señal de entrada:

Respuesta:
Para aplicar el teorema de autofunciones expresamos como una combinación lineal de exponenciales complejas:

Aplicando la ecuación (4), la salida es la siguiente:

Procedemos a calcular cada uno de los factores H(i):


Por otra parte:


Además:

Por lo tanto:

Finalmente la expresión definitiva para y(t) es:

En consecuencia:

Fuentes:
- Fundamentos_de_Señales_y_Sistemas_usando la Web y Matlab
- Oppenheim – Señales y Sistemas
- Análisis de Sistemas Lineales Asistido con Scilab – Un Enfoque desde la Ingeniería Eléctrica.
- Amplificador Operacional
- CIRCUITO TRANSFORMADO DE LAPLACE
- DINAMICA CIRCUITOS
- INTRODUCCION A LAS SENALES Y SISTEMAS
- RESPUESTA EN FRECUENCIA
- TRANSFORMACION DE LAPLACE
- Control Systems Engineering, Nise
- Convolución LTI
Te puede interesar:
- Convolución de señales discretas – Sumatoria de convolución
- Sumatoria de Convolución
- Ecuaciones diferenciales en tiempo discreto
- Convolución de señales discretas en Matlab
- Convolución en el tiempo continuo – Ejemplos
- Convolución de un señal con su respuesta al impulso – Ejemplo en Matlab
- Método gráfico de convolución de señales continuas
Escrito por Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer – Twitter: @dademuch
Se hacen trabajos, se resuelven ejercicios!!
WhatsApp: +34633129287 Atención Inmediata!!
Mentoring Académico / Emprendedores / Empresarial
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: Caracas, Quito, Guayaquil, España: Tlf. +34633129287.
WhatsApp: +34 633129287
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com