
Comencemos con una pregunta ¿Qué papel juega DSP (Digital Signal Processing) en los sistemas de control modernos?
Las herramientas clásicas de control para sistemas de tiempo continuo permiten el diseño de circuitos analógicos para gobernar todo tipo de sistemas físicos. Sin embargo, con los microprocesadores, los ingenieros de control son capaces de ajustar o cambiar la ley de control de una manera más rápida y versátil. La dificultad radica en la necesidad de trasladar todos los conceptos de la ingeniería clásica de control al nuevo escenario en que las señales no son conocidas en todo instante de tiempo (sistemas de tiempo discreto).
Las herramientas básicas para el control de sistemas de tiempo discreto son El Concepto de Muestreo y Reconstrucción y el análisis matemático de las señales muestreadas mediante La Transformada Z. Estos serán los primeros tópicos de conocimiento que necesitamos adquirir, compartir, simular y organizar en una KB (Knowledge Base).

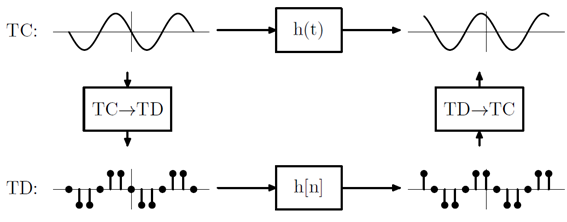
Los pasos TC a TD y viceversa, permiten emplear sistemas tiempo discreto para realizar el procesado de las señales analógicas del mundo real y devolverlas al mismo. Se necesita una interfaz entre la señal analógica y el procesador digital. Esta interfaz se llama conversor A/D.
La señal digital concede las siguientes ventajas:
- El almacenamiento es más fácil en soportes magnéticos (discos y cintas), sin deterioro o pérdida en la fidelidad de la señal.
- La tolerancia en los circuitos analógicos son más difíciles de controlar, mientras que en los digitales es más fácil.
- El procesado digital permite la implementación de algoritmos de procesado más sofisticados.
- El procesado digital es más barato que su equivalente analógico. El hardware digital es más barato que el analógico.
- El procesado de señales digitales es más flexible.
- La transmisión de señales digitales es menos susceptible al ruido que la analógica.
- Las señales digitales permiten evitar la distorsión, el ruido de transmisión y la diafonía.
Sin embargo, hay una limitación práctica. La velocidad de operación de los convertidores A/D y la velocidad de los procesadores de señales digitales. Las señales con ancho de banda grande precisan de convertidores A/D con velocidades de muestreo altas y procesadores digitales rápidos, lo cual es una limitación física.
Ejemplo de implementación analógica.

Los potenciómetros del circuito de la Figura 12.2 permiten modificar la ley del compensador de la Figura 12.1 (hasta ciertos límites). Sin embargo, si el ingeniero desea probar otro tipo de compensador, tendrá que soldar un nuevo circuito, alternativa muy tediosa, lenta y poco práctica.
Por motivos de flexibilidad, coste, programabilidad, almacenamiento y capacidad de compresión, es preferible el procesamiento de señales (DSP) mediante sistemas digitales.
Ejemplo de implementación digital.

En la Figura 12.3 se muestra la alternativa digital al mismo problema. Se sustituye el controlador por un microprocesador, capaz de recibir la magnitud del error en los puertos de entrada (normalmente convertidores A/D, contadores de pulsos, encoders, etc…) y comandar la actuación de la planta a través de los puertos de salida (normalmente convertidores D/A). La operación del microprocesador está comandada por un reloj (interior o exterior), que marca los instantes en los que se ejecutan las sentencias del programa introducido por el ingeniero. Si el mismo desea cambiar el algoritmo, sólo tiene que cambiar las líneas del programa. Por este cambio evolutivo, este modo de control es mucho más versátil y práctico para el proceso de diseño.
El reloj también señala la frecuencia con la que se produce la lectura de los convertidores A/D y el comando de las salidas D/A. ¿qué datos puede utilizar el ingeniero en su programa para calcular la salida o actuación del controlador? No se puede esperar que un microprocesador sea capaz de controlar el movimiento del cabezal de un disco duro, si el reloj ordena la ejecución del programa cada minuto. Pero, el mismo sistema podría controlar la temperatura del interior de un edificio. Por lo tanto, la frecuencia de ejecución del programa de control es una decisión clave del ingeniero.
Para constatar el papel que la integración DSP-Control juega en el mercado, vemos el siguiente esquema:

Nuestro siguiente paso será formular las herramientas básicas del DSP: El Concepto de Muestreo y Reconstrucción y el análisis matemático de las señales muestreadas mediante La Transformada Z.
Recursos:
Informática avanzada para mecatrónica
Contacta con tu profesor
WhatsApp: +34 633129287 (atención lo más inmediata posible – tome en cuenta horario España)
email: dademuchconnection@gmail.com
Si tienes un ejercicio que debes resolver de manera urgente, te recomiendo intentar primero el hacerlo por ti mismo. Si no logras resolverlo ¡¡ATENCIÓN!!……!! … Prof. Larry. Se hacen trabajos, ejercicios, clases online, talleres, laboratorios, Academic Paper, Tesis, Monografías. Resuelvo problemas y ejercicios …atención inmediata!! si utilizas mi número de Whatsapp..tome en cuenta horario España.
Elaborado por Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España: Tlf. 633129287
Caracas, Valladolid, Quito, Guayaquil, Jaén, Villafranca de Ordizia.
WhatsApp: +34 633129287
+34 678250977
