Para analizar el consumo de Potencia en un sistema trifásico balanceado, es conveniente iniciar por la potencia absorbida por la carga. En el caso de una carga conectada en Y (estrella) como en la Figura 1:

Figura 1: Conexión Y-Y balanceada.
Las tensiones de fase de la carga (que en el caso de la Figura 1 son las mismas que las tensiones de fase del generador) son:

Donde el factor  es necesario porque Vp se ha definido como el voltaje RMS de la tensión de fase. Suponga que la impedancia Zy «en notación fasorial» es:
es necesario porque Vp se ha definido como el voltaje RMS de la tensión de fase. Suponga que la impedancia Zy «en notación fasorial» es:

Si la impedancia Zy es inductiva, las corrientes de fase se atrasan respecto a las tensiones de fase respectivas en Θ. Así:

La potencia instantánea total P en la carga es la suma de las potencias instantáneas en las tres fases; es decir:

Donde Vp y Ip son magnitudes. De este modo, la potencia instantánea total en un sistema trifásico balanceado es constante; no cambia con el tiempo, como sí lo hace la potencia instantánea de cada fase. Esto es así independientemente de que la carga esté conectada en Y o en Δ. Esta es una poderosa justificación para utilizar un sistema trifásico para generar y distribuir potencia eléctrica.
La potencia promedio por fase Pp entonces es P/3:

La potencia reactiva por fase Qp es:

La potencia aparente Sp por fase es:

Se coloca el módulo de Sp para resaltar una vez más que la potencia aparente es el módulo de la potencia compleja por fase Sp la cual es:

Dónde:

La potencia promedio total es la suma de las potencias promedio en las fases:

En una carga conectada en Y, IL=Ip, pero  , mientras que en una carga conectada en Δ,
, mientras que en una carga conectada en Δ,  mientras que VL=Vp. Así, la ecuación (1) se aplica tanto a cargas conectadas en Y como conectadas en Δ. De igual forma, la potencia reactiva total es:
mientras que VL=Vp. Así, la ecuación (1) se aplica tanto a cargas conectadas en Y como conectadas en Δ. De igual forma, la potencia reactiva total es:

Y la potencia compleja total es:

Dónde:
es la impedancia de carga por fase (podría llamarse también Zy como en la Figura 1). De la ecuación (2) se obtiene que:

Ejemplo 1:
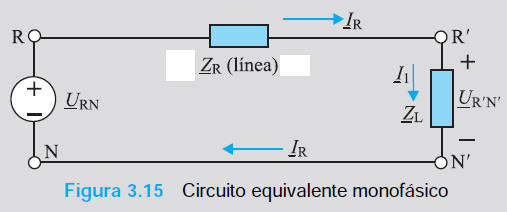
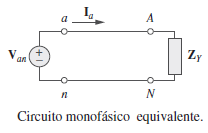
Considere el circuito trifásico de la Figura 2:

Figura 2. Circuito para el ejemplo 1.
Es suficiente considerar una fase ya que el sistema está balanceado. Entonces:

Demostración (suponiendo secuencia abc):

Así, en la fuente, la potencia absorbida es:

Entonces, la potencia real promedio absorbida (entregada por la fuente) es de -2087 W y la potencia reactiva de -834.6 VAR.
En la carga la potencia compleja absorbida es:

Entonces, la potencia real promedio absorbida por la carga es de 1392 W y la potencia reactiva absorbida es de 1113 VAR.
En la línea la potencia compleja absorbida es:

Se puede demostrar fácilmente que:

Ejemplo 2:
Dos cargas balanceadas se conectan a una línea de 240 kV rms a 60 Hz, como se muestra en la Figura 3.

La carga 1 toma 30 kW, con un factor de potencia fp atrasado de 0.6, mientras que la carga 2 toma 45 kVAR con un factor de potencia atrasado de 0.8. Suponiendo la secuencia abc, determinar las potencias compleja, real y reactiva absorbidas por las cargas combinadas; b) las corrientes de línea y c) la capacidad nominal en kVAR de los tres capacitores conectados en paralelo con la carga que elevarán el factor de potencia a atrasado de 0.9 y la capacitancia de cada capacitor.
Solución:
a. En cuanto a la carga 1, dado que:
 Por lo tanto:
Por lo tanto: Luego:
Luego:


De esta manera, la potencia compleja (en negritas, lo que indica que es un vector) debida a la carga 1 es:
En cuanto a la carga 2:
 Luego:
Luego:
 Por lo tanto:
Por lo tanto:

De esta manera, la potencia compleja debida a la carga 2 es:

La potencia compleja total absorbida por la carga es:

La cual indica que la carga tiene un factor de potencia:

b. Puesto que:

Se aplica esto a cada carga:

Dado que en la carga 1 el factor de potencia está en atraso, la corriente está en atraso con respecto al voltaje. Por tanto:
Carga 2:

Dado que en la carga 2 el factor de potencia está en atraso, la corriente está en atraso con respecto al voltaje. Por tanto:

Tomando en cuenta que el sistema está equilibrado y que, por tanto, las corrientes tienen entre sí los mismos desfases que los voltajes de fase de la fuente o de la carga, las corrientes de línea total son:

c. La potencia reactiva necesaria para aumentar el factor de potencia a 0.9 atrasado puede determinarse en la ecuación siguiente:
 Dónde:
Dónde:

Por tanto:

Esta potencia reactiva es para el banco de capacitores en su totalidad. Para cada capacitor toca:

La capacitancia requerida es:

Ver también: Problema de examen de circuito trifásico
Fuente:
- Fundamentos_de_circuitos_electricos_5ta (Capt. 12)
- Introduccion-al-analisis-de-circuitos-robert-l-boylestad,
- Análisis de Redes – Van Valkenburg,
- Fundamentos_de_Señales_y_Sistemas_usando la Web y Matlab
SIGUIENTE:
Revisión literaria hecha por:
Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
Se hacen trabajos, se resuelven ejercicios!!
WhatsApp: +34633129287 Atención Inmediata!!
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34633129287
Caracas, Quito, Guayaquil, Cuenca.
WhatsApp: +34633129287 +593998524011
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com