La señal pulso cuadrado es aquella señal analógica cuya amplitud es 1 para un cierto intervalo finito de valores de la variable independiente y 0 en el resto:
La forma gráfica del puso cuadrado es:
Se observa que la señal pulso cuadrado permite acotar fácilmente cualquier señal finita analógica definida entre t1 y t2, simplemente definiendo T y t0 de modo tal que t1=t0-T/2 y t1=t0+T/2. Sin embargo, para definir de forma compacta tanto una señal analógica definida por intervalos como el período básico de una señal periódica analógica, sigue siendo más útil la señal escalón unitario analógica. La razón de esto está en que los intervalos de definición de la señal escalón unitario normalmente son cerrados por la izquierda y abiertos por la derecha, mientras que el intervalo de definición de la señal pulso cuadrado es cerrado por ambos lados. Es justamente por esta razón por la cual la señal pulso cuadrado no puede ser expresada como la diferencia de dos escalones unitarios analógicos: el límite por la izquierda está incluido en el intervalo de definición de la señal pulso cuadrado. Es también por esta razón que tiene sentido definir la señal pulso cuadrado en el dominio analógico, pero no en el dominio digital. Si quisiéramos definir una versión digital de la señal pulso cuadrado, no tendríamos más que restar dos escalones unitarios digitales desplazados.
Una señal periódica muy interesante puede definirse a partir de la señal pulso cuadrado: el tren de pulsos cuadrados de ancho T y período fundamental T0:
La representación gráfica del tren de pulsos cuadrados se muestra a continuación:
A continuación, ejercicios de examen sobre «Respuesta en el tiempo de sistemas de control automático»
TEORIA GENERAL
La forma estándar de la función de transferencia de un sistema de 2do orden es:
Dónde:
La ganancia estática k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn, son los parámetros de un sistema de segundo orden.
En comparación con la simplicidad de un sistema de primer orden (Sistemas de primer orden), un sistema de segundo orden exhibe una amplia gama de respuestas que deben analizarse y describirse. Mientras que variar el parámetro de un sistema de primer orden (constante de tiempo) simplemente cambia la velocidad de la respuesta, los cambios en los parámetros de un sistema de segundo orden pueden cambiar la forma total de la respuesta.
INTRODUCCIÓN: ¿De dónde proviene la ecuación (1)?
El diagrama de bloques de la Figura 1 representa a un sistema de segundo orden de tipo cero. Físicamente, este diagrama puede ser el modelo de un motor DC, el modelo de una red eléctrica o de un mecanismo con resorte, amortiguador y masa. Por ello, el sistema de segundo orden es de gran interés académico, industrial y tecnológico, de los más importantes para el estudio.
Figura 1.
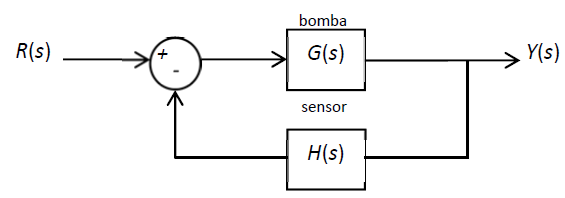
Los sistemas de segundo orden son esenciales en el diseño de sistemas de control. En consecuencia, es de gran utilidad entender que el modelo de la Figura 1 suele provenir de un sistema realimentado como el de la Figura 2:
Figura 2.
El sistema de la Figura 2 se puede ver como un sistema de control básico. Una planta de segundo orden de tipo 1, con un polo en s=-2ζωn, en serie con un controlador proporcional, y realimentación unitaria. Para diseñar un sistema de control, por excelencia se utiliza principalmente la entrada escalón unitario como señal de prueba. Es así porque a partir de ella, derivando podemos hallar la respuesta al impulso unitario, e integrando, la respuesta a la rampa unitaria.
El comportamiento del sistema de control ante una entrada escalón unitario depende de estos tres factores: la ganancia k , el coeficiente de amortiguamiento ζ, y la frecuencia natural ωn. Con solo conocer el valor del coeficiente de amortiguamiento ζ, podemos determinar la forma de la respuesta del sistema.
Por otra parte, en ocasiones podremos cumplir con los requerimientos de diseño de un sistema de control con sólo variar el valor de la ganancia k, como veremos en el caso siguiente, cuya respuesta aparece más adelante:
Ejemplo 1:
Para la planta de la Figura 88, diseñar un sistema de control que cumpla con los siguientes requerimientos ante una entrada escalón unitario: una salida c(t) con Sobrepaso máximo (Mp) igual al 5%, tiempo de establecimiento (ts) de 2.1 segundos, y error en estado estable a la entrada escalón unitario (ep) menor o igual al 50%:
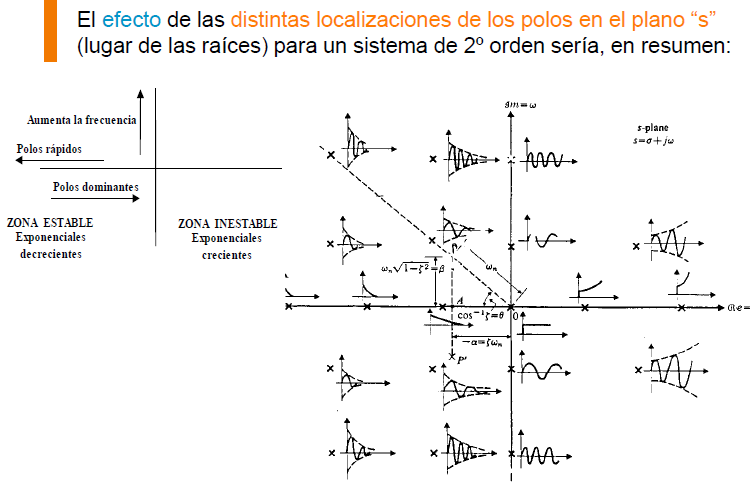
La función de transferencia estándar (1) se deriva tanto del diagrama de bloques de la Figura 1, como del de la Figura 2, diseñada en función de estos parámetros (ganancia, frecuencia natural y coeficiente de amortiguamiento) que están ligados al comportamiento físico de la respuesta y a la situación de sus polos en el plano “s”.
TIPOS DE SISTEMAS DE SEGUNDO ORDEN: según ubicación de los polos.
Un sistema de segundo orden es aquel que posee dos polos. La ecuación (1) tiene dos polos:
Las raíces del polinomio del denominador de la ecuación (1) son los polos del sistema. A continuación se muestra la clasificación general de la respuesta de sistemas de segundo orden a la entrada escalón unitario, determinada por la posición de sus polos en el plano “s”:
Subamortiguado (polos complejos conjugados con parte real negativa)
Críticamente amortiguado (polos reales puros – negativos e iguales – llamado polo doble)
Sobreamortiguado (polos reales puros – negativos y diferentes)
Oscilatorio (polos imaginarios puros)
Inestable (polos complejos conjugados con parte real positiva)
El tipo «Subamortiguado» es el más utilizado para el diseño de sistemas de control. Por ello analizamos el caso Subamortiguado en primer lugar y con mayor énfasis que en el resto de los casos.
TIPOS DE SISTEMAS DE SEGUNDO ORDEN: según el valor deζ (factor de amortiguamiento)
Como se dijo anteriormente, con solo conocer el valor del coeficiente de amortiguamiento ζ, podemos determinar la forma de la respuesta del sistema:
Subamortiguado (0<ζ<1)
Críticamente amortiguado (ζ=1)
Sobreamortiguado (1<ζ)
Oscilatorio (ζ=0)
Inestable (ζ<0)
La siguiente figura es un resumen del tipo de sistema y la forma de la salida del sistema de segundo orden para una entrada escalón unitario, de acuerdo al valor del coeficiente de amortiguamiento y la ubicación de los polos:
Figura 3.
Sistema de 2do orden Sub-amortiguado
Dada la función de transferencia de un sistema de control:
ya hemos visto que un sistema de segundo orden Sub-amortiguado es aquel cuyo coeficiente de amortiguamiento tiene valores entre cero y uno (0<ζ<1) y tiene dos polos complejos conjugados s1 y s2, localizados como lo indican las X en el plano transformado «s» siguiente:
Figura 4.
Este sistema, sometido a una entrada escalón unitario, en el dominio del tiempo presenta una salida c(t) con el siguiente comportamiento genérico:
Figura 5.
La ganancia estática k en este caso, es el valor de la salida en estado estable. Es decir:
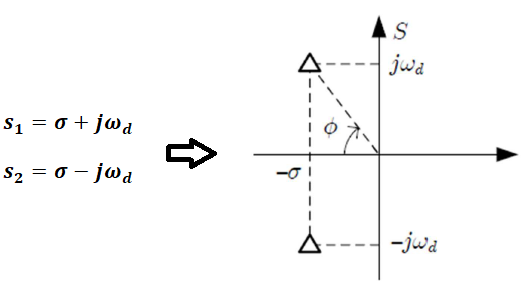
Por cuestiones prácticas nos interesa expresar los polos como dos números complejos de la siguiente forma genérica:
Figura 6.
dónde:
A continuación vamos a obtener una relación muy útil para el proceso de diseño de controladores. Podemos ver en la Figura 6 que se forma el ángulo Φ en el triángulo señalado por líneas discontinuas. Se puede demostrar que:
Es decir, que si conocemos el valor de los polos complejos conjugados de un sistema de segundo orden, además de saber directamente que es un sistema subamortiguado, podemos determinar mediante la relación anterior el factor de amortiguamiento de dicho sistema. Y viceversa. Si nos dan el valor de ζ, podemos obtener el valor de Φ, y utilizar este valor para obtener la ubicación de los polos, un hecho relevante cuando se diseña un controlador.
Ejemplo 2:
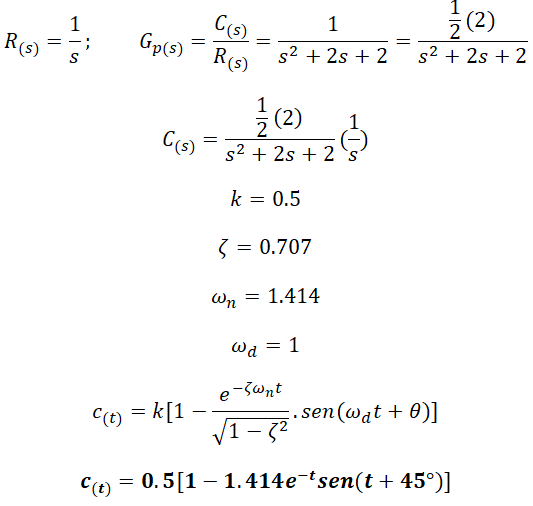
Supongamos que una planta tiene la siguiente función de transferencia:
Al simular la respuesta de este sistema a la entrada escalón unitario obtenemos la siguiente curva:
>> G=tf([1],[1 2 2]);
>>step(G)
Figura 7
La curva de salida se corresponde con el de un sistema de segundo orden subamortiguado. Podemos conocer los valores de los parámetros de importancia mediante:
>> damp(G)
Podemos corroborar estos valores mediante las ecuaciones formuladas:
k=0.5
Respuesta del sistema de 2do orden subamortiguado en el tiempo.
Sabemos que la transformada de Laplace del escalón unitario es 1/s. Por lo tanto la expresión para la salida C(s) en el dominio transformado es:
Podemos determinar la ecuación de la salida c(t) en el dominio del tiempo, aplicando la anti-transformada de Laplace a C(s):
La siguiente gráfica muestra cada uno de los componentes de la salida c(t):
Figura 8.
La Figura 8 muestra los factores que se suman y se multiplican para generar la salida c(t) (interesante es tener presente que se trata la respuesta al escalón unitario del sistema de segundo orden subamortiguado). La salida es oscilatoria amortiguada. La frecuencia de dicha señal oscilatoria es ahora ωd (frecuencia amortiguada). La oscilación está amortiguada por el término exponencial decreciente.
Ejemplo 3. Aplicando una entrada escalón unitario y aplicando el procedimiento descrito anteriormente para la planta del ejemplo dos, vemos que:
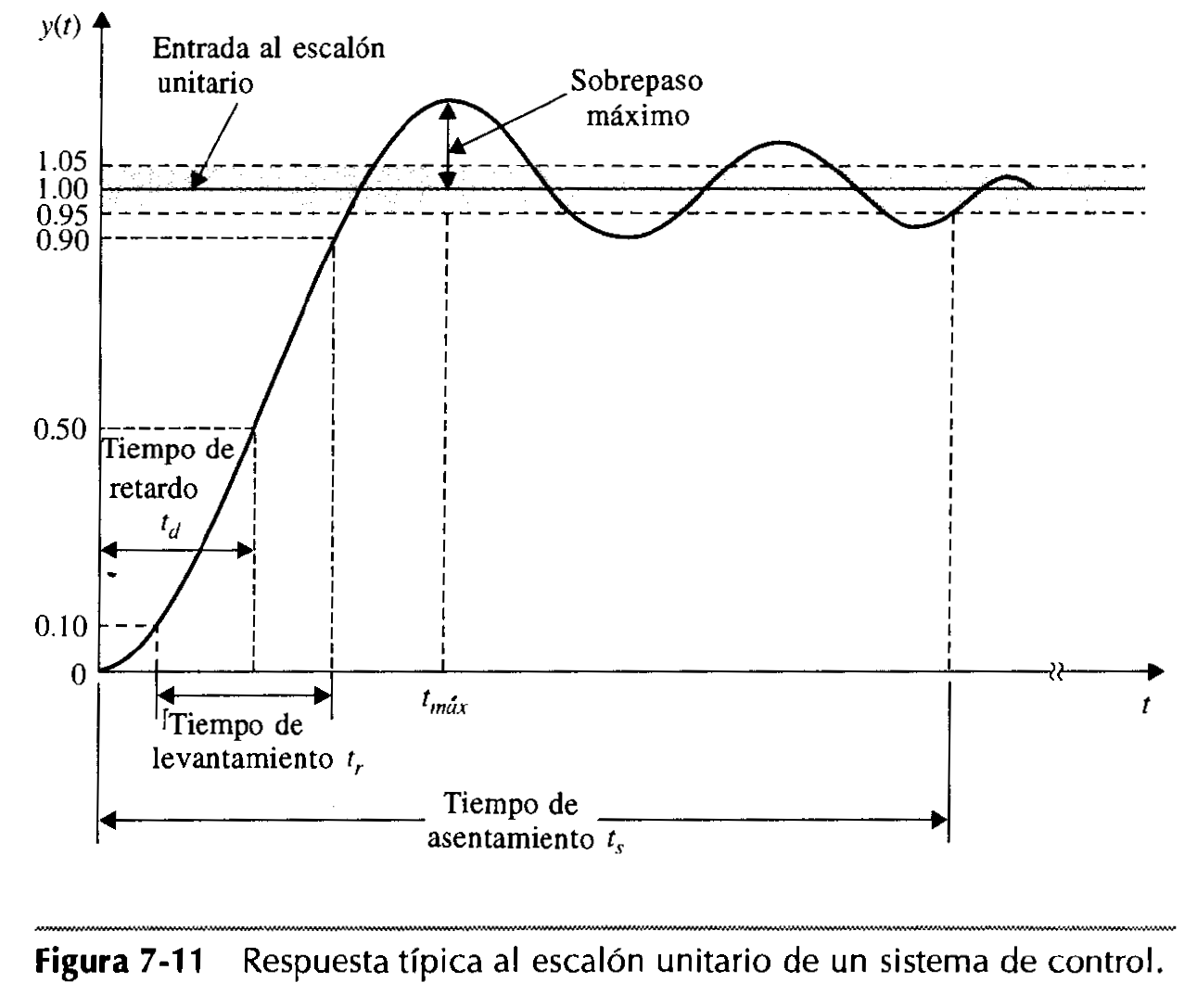
Especificaciones de respuesta transitoria para un sistema de control de 2do grado subamortiguado
Especificaciones de diseño. Los sistemas de control se diseñan para realizar tareas específicas. Para diseñar un sistema de control, lo primero es conocer las condiciones que debe cumplir ante una entrada escalón unitario. Si se espera que la salida del sistema se comporte como la de un sistema segundo orden subamortiguado, las especificaciones de diseño son las siguientes:
Sobrepaso máximo (Mp): es el valor pico máximo de la curva de respuesta medida a partir de la unidad. Según otra bibliografía, es también la cantidad en que la forma de la curva de salida sobrepasa el valor final de la salida, expresada en porcentaje.
Tiempo de retardo (Td): es el tiempo requerido para que la respuesta del sistema alcance la mitad del valor final por primera vez.
Tiempo de asentamiento (Ts): es el tiempo requerido para que las oscilaciones amortiguadas transitorias alcancen y permanezcan dentro del ±2% o del ±5% del valor final o valor en estado estable.
Tiempo de levantamiento (Tr): es el tiempo requerido para que la respuesta del sistema pase del 10% al 90% del valor final. En otras palabras, para que vaya de 0.1 del valor final al 0.9 del valor final. Un segundo criterio define este tiempo como aquel en el que se alcanza por primera vez el valor en estado estable (criterio del 100%).
Tiempo pico (Tpó Tmáx):es el tiempo requerido para que la respuesta del sistema alcance el pico del levantamiento máximo.
En especial, los requerimientos para el diseño de un sistema de seguimiento (servosistema) se especifican en base a estos conceptos.
Fórmulas para las especificaciones de un Sistema de 2do orden Sub-amortiguado
A continuación se presentan fórmulas que pueden ayudar a determinar analíticamente las especificaciones de un sistema de segundo orden sub-amortiguado para el que se conoce la forma estándar de la función de transferencia, ecuación (1).
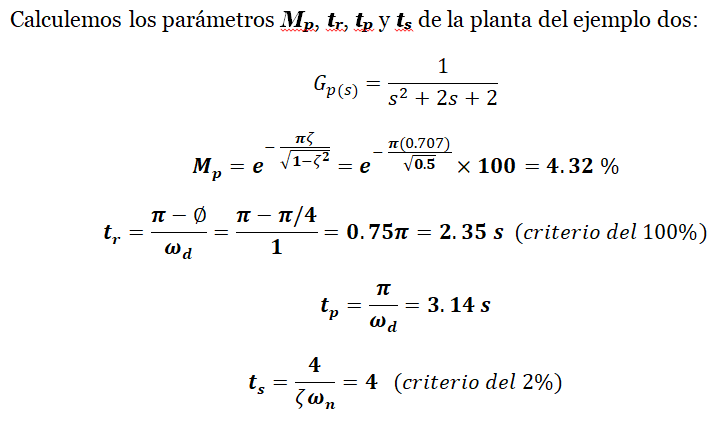
Sobrepaso máximo (Mp). Consideran como la salida del sistema:
donde c(t(p)) es el valor de la salida en el tiempo pico, mientras c(∞) es el valor de la salida en estado estable.
Tiempo pico (Tp):
Factor de amortiguamiento (ζ):
Es muy útil contar además con la expresión para el factor de amortiguamiento relativo ζ en función del sobrepaso Mp dado en porcentajes:
Tiempo de asentamiento (Ts)
Tiempo de levantamiento (Tr)
Tiempo de retardo (Td)
(interesante es recordar que estos parámetros sólo aplican para la respuesta al escalón unitario del sistema de segundo orden subamortiguado)
Ejemplo 4: Calculamos estos parámetros Mp, tr, tp y ts para la planta del ejemplo 2:
>> stepinfo(G)
La respuesta transitoria de un sistema de control en la práctica siempre exhibe oscilaciones amortiguadas antes de alcanzar el estado estable. Esto ocurre porque los sistemas tienen componentes que almacenan energía y no pueden responder de manera inmediata a los cambios en la entrada. La respuesta transitoria a una entrada escalón depende de las condiciones iniciales. Es por ello que en la práctica se acostumbra considerar que el sistema está inicialmente en reposo de modo tal que las condiciones iniciales (la salida y sus derivadas) son iguales a cero.
Efecto de añadir un cero a un sistema de 2do orden Subamortiguado.
Un cero adicional hace al sistema más rápido y oscilatorio, tanto más cuanto más se acerque al origen. Para mayor información visita:
Establecer la ganancia es el primer paso encaminado a ajustar el sistema para un desempeño satisfactorio. Sin embargo, en muchos casos prácticos el solo ajuste de la ganancia tal vez no proporcione una alteración suficiente del comportamiento del sistema para cumplir las especificaciones dadas. En este caso, es necesario volver a diseñar el sistema. Este nuevo diseño a adición de un dispositivo apropiado se denomina compensación. Para mayor información visita:
Efecto de añadir un polo a un sistema de 2do orden Subamortiguado.
Un polo adicional (de valor negativo) hace al sistema más lento, tanto más cuanto más e acerque al origen.
Sistema reducido equivalente
Un sistema de orden mayor a dos, de función de transferencia G1(s), se puede reducir a un sistema reducido equivalente con función de transferencia G2(s), si teniendo el segundo menor número de polos y/o ceros que el primero, la respuesta temporal de ambos es similar. El objetivo de este procedimiento es despreciar los efectos sobre el comportamiento del sistema de unos polos y/o ceros frente a los que se consideren dominantes.
Para reducir, se deben cumplir las siguientes reglas:
Nunca despreciar (simplificar) el efecto de un polo inestable;
Despreciar los polos y/o ceros relativamente más alejados del origen;
Simplificar parejas de polos-ceros relativamente cercanos entre sí;
Los sistemas real y reducido equivalentes deben tener la misma ganancia estática.
Sistema de 2do orden Oscilatorio: No amortiguado
Un sistema de segundo orden no amortiguado es aquel cuyo coeficiente de amortiguamiento es igual a cero (ζ=0). Este sistema tiene dos polos imaginarios puros. Sometido a una entrada escalón unitario presenta el siguiente comportamiento genérico:
La frecuencia de dicha salida oscilatoria es ωn, es decir, la frecuencia natural o no amortiguada del sistema. Cuanto más lejos están los polos del origen, mayor es la frecuencia natural.
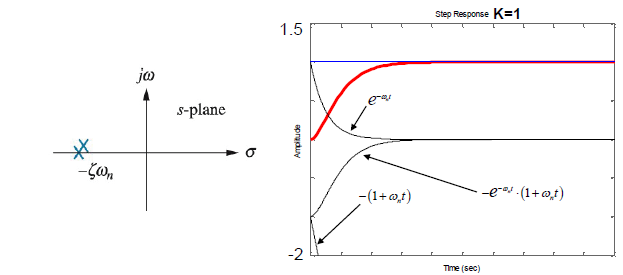
Sistema de segundo orden críticamente amortiguado
Un sistema de segundo orden con amortiguamiento crítico es aquel cuyo coeficiente de amortiguamient0 es igual a uno (ζ=1).Este sistema tiene dos polos reales negativos e iguales y su valor es igual a –ωn.
Sometido a una entrada escalón unitario presenta el siguiente comportamiento genérico:
En este caso como se puede ver en la Figura anterior, la salida c(t) es el producto de una exponencial decreciente y una recta. Representa la respuesta más rápida posible del sistema sin que haya oscilación.
Sistema de segundo orden con sobre-amortiguamiento
Un sistema de segundo orden con sobre amortiguamiento es aquel cuyo coeficiente de amortiguamient0 es mayor que uno (ζ>1).Este sistema tiene dos polos reales negativos y distintos:
La respuesta de este sistema está dominada por el polo más lento, el polo s1 de acuerdo con la siguiente figura que muestra el comportamiento genérico del sistema sometido a una entrada escalón unitario:
Es decir, s2, el polo más rápido, se puede despreciar. En este caso, la salida c(t) es la combinación lineal de dos exponenciales.
Respuesta al impulso unitario de un sistema de segundo orden
Para una entrada impulso unitario r(t), la transformada de Laplace correspondiente es R(s)=1, la respuesta C(s) impulso unitario del sistema de segundo orden de la ecuación (1) es:
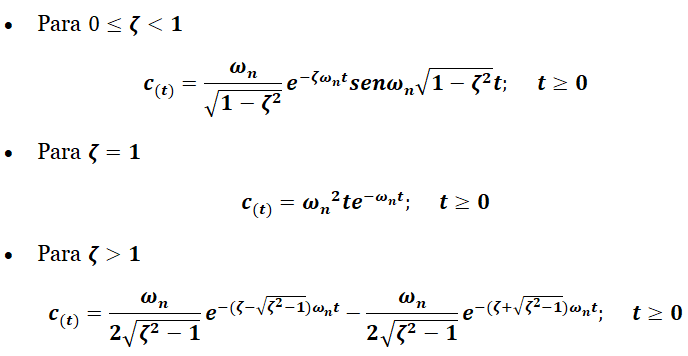
La transformada inversa de Laplace para esta ecuación da la salida c(t) en el tiempo que, de acuerdo con el valor del coeficiente de amortiguamiento ζ, es:
También se puede obtener la respuesta c(t) del sistema a la entrada impulso unitario, diferenciando la respuesta al escalón unitario.
Aplicar control PID a Función de Transferencia - 1er grado o 2do grado - Catálogo 14
Este catálogo ofrece la solución analítica completa a prácticas de configuración y diseño de sistemas de control para Función de Transferencia de primer orden o de segundo orden, generalmente aplicando un controlador PID, álgebra de bloques, y la teoría que forma parte de la cátedra de sistemas de control, señales y sistemas, ingeniería industrial, mecatrónica, etc. Además, la solución implica el uso de Matlab y/o Simulink. Cada laboratorio tiene un costo de 14.5 euros. Se facilita pago a través de Paypal. También el autor ofrece servicio para resolver prácticas y laboratorios a particulares: +34633129287.
Práctica 1
Para la función de transferencia:
Función de Transferencia de 1er orden.
Graficar la respuesta para una entrada de 250 sin control en lazo abierto y sin control en lazo cerrado;
Graficar la salida aplicando control PID con las siguientes constantes de Kp=60; Ki=400; Kd=10 y con una entrada escalón unitario. Ejecutar ambas: Solución analítica y Solución haciendo uso de la herramienta sisotool de Matlab para configurar el controlador.
Simular en Simulink
Aplicar control a función de transferencia de 1er-2do orden – Catálogo 14
Pago por una (1) práctica de configuración y diseño de sistemas de control PID para Función de Transferencia de primer orden o de segundo orden. Luego de pagar por favor comunicarse a Whatsapp +34633129287
Problemas resueltos de Análisis de respuesta transitoria de sistemas lineales - Matlab - Catálogo 9
En esta guía PDF se analiza la respuesta transitoria de sistemas que forman parte de la cátedra de sistemas de control, señales y sistemas, análisis de redes eléctricas, etc. Cada solución además ofrece un código de Matlab para graficar las señales y/o la simulación de la respuesta. Cada problema tiene un costo de 12.5 euros. La Guía completa tiene un valor de 21.5 euros. Se facilita pago a través de Paypal.
A continuación, los enunciados de problemas resueltos en esta guía.
Problema 1.
Para el sistema de la Figura siguiente:
1.a Calcula y justifica el valor de la ganancia estática y la constante de tiempo cuandoG(s) y H(s):
Simular en Matlab.
1.b Analiza el comportamiento (subamortiguado, sobreamortiguado, críticamente amortiguado, inestable, oscilación mantenida) de la salida para los diferentes valores del parámetro a ante la entrada escalón unitario cuando:
El parámetro a toma valores reales. Simular en Matlab.
1.c Calcula frecuencia natural no amortiguada, frecuencia natural amortiguada, factor de amortiguamiento, tiempo de crecimiento, tiempo pico, sobre impulso máximo para el caso b. Simular en Matlab
Problema 2.
Sea el sistema adjunto:
Se pide:
2.a Obtener la función de transferencia del sistema, considerando la tensión eicomo la señal de entrada al sistema y la tensión eo como la señal de salida del sistema.
2.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende de los valores de las resistencias y del condensador?
2.c Obtener el valor del tiempo en el que la salida del sistema alcanza el 95% de su valor final, suponiendo que los valores de R y C son iguales a 1. Simular en Matlab.
Problema 3.
Para el sistema adjunto:
Se pide:
3.a Obtener la función de transferencia del sistema, considerando la tensión vicomo la señal de entrada al sistema y la tensión vo como la señal de salida del sistema.
3.b Calcular, a partir del modelo obtenido, el valor de estabilización del sistema ante entrada escalón unitario. ¿Depende del valor de la resistencia R?
3.c Analiza el sistema respecto al parámetro R. Simular en Matlab.
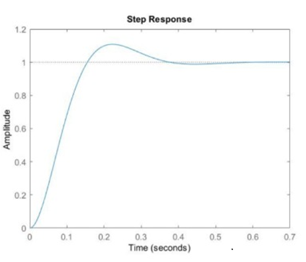
Problema 4
Se tiene un sistema cuya función de transferencia es:
Ka es una ganancia que se ajusta para obtener una respuesta deseada. Determinar el valor de Ka para obtener la respuesta que se observa en la gráfica 3. Esta salida corresponde a la respuesta al escalón unitario. Simular en Matlab.
Método de pago
Catálogo 9 – Respuesta transitoria
Pago por un ejercicio – 12.5 euros. Después de pagar por favor comunicarse al whatsapp +34633129287 o al email dademuchconnection@gmail.com para la entrega.
Pago por toda la guía – 21.5 euros. Después de pagar por favor comunicarse al whatsapp +34633129287 o al email dademuchconnection@gmail.com para la entrega.
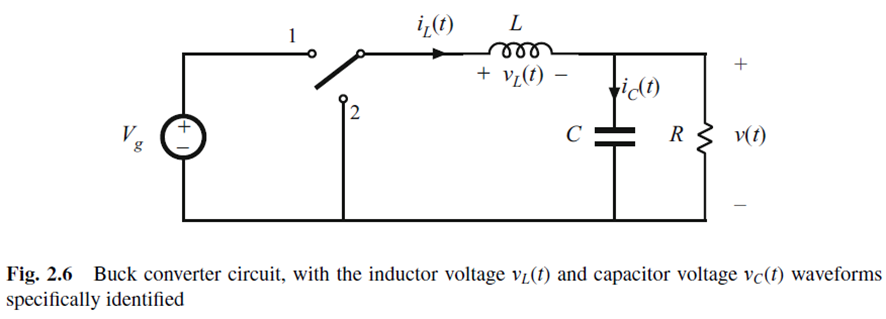
Let us more closely examine the inductor and capacitor waveforms in the buck converter illustrated in Figure 2-6.
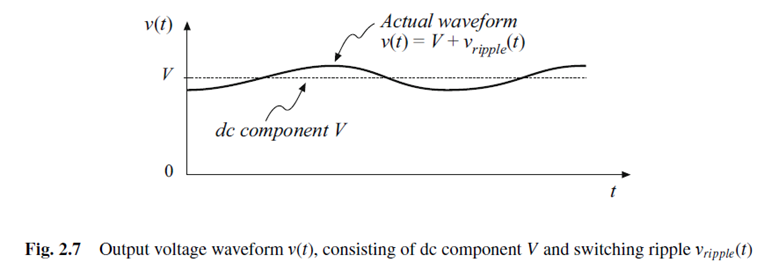
Actually, the output voltage appears as illustrated in Figure 2-7.
This approximation is known as The small ripple approximation or the linear ripple approximation.
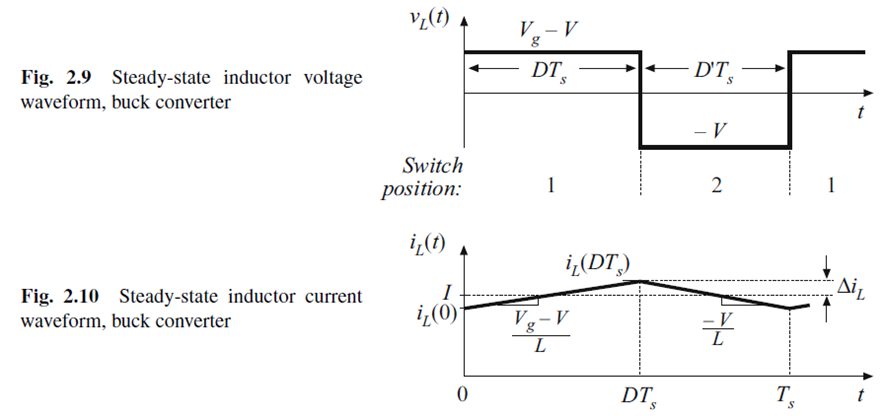
With this approximation, let us analyze the inductor current waveform. Since the inductor voltage is essentially constant during the first interval (switch in position 1), the inductor current slope of equation (6) is also essentially constant and the inductor current increase linearly, as in Figure 2-10:
Solution for L yields:
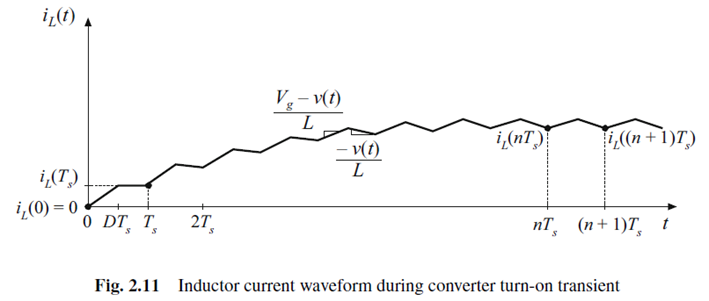
Equations (1) to (3) and Figure 2.10 are derived under steady-state conditions. Let us consider next what happens to the inductor current when the converter is first turned on. Suppose that the inductor current and output voltage are initially zero, and an input voltage Vg is the applied. As shown in Figure 2.11, during the first subinterval, with the switch position in 1, we know that the inductor current will increase.
Since the inductor current iL(t) flows to the output, the output capacitor will charge slightly, and will v(t) increase slightly too. The process repeats during the second and succeeding switching periods, with inductor current iL(t) increasing during each subinterval 1 and decreasing during each subinterval 2.
As the output capacitor continues to charge and v(t) increases, the slope during each subinterval 1 decreases and the slope during each subinterval 2 becomes more negative. There is no change in the inductor current over a complete switching period and the converter reachs the steady state condition.
The requirement that, in equilibrium, the net change in inductor current over one switching period be zero lead us to a way to find steady-state condition in any switching converter. That is what we call the inductor volt-second balance.
Given the defining relation of an inductor:
Integration over one complete switching period, say from t=0 to t=Ts yields:
In steady-state condition, the initial and final value of the inductor current is equal, so:
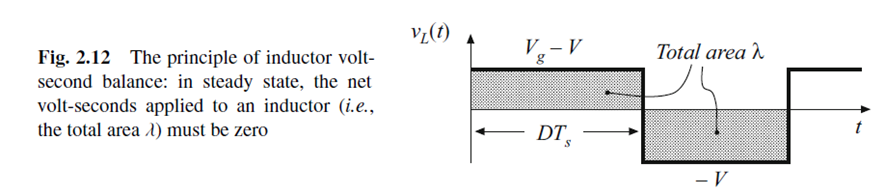
The right hand of equation (6) has the units of volt-second or flux-linkages. It states that the total area, or net volt-seconds, under the vL(t) waveform must be zero under steady-state condition.
An equivalent form is obtained by dividing both sides of equation (6) by the switching period:
Equation (7) is recognized as the average value, or DC component, of vL(t). Equation (7) states that, under steady-state condition, the applied inductor voltage must have zero DC component.
The inductor voltage waveform is reproduced in Figure 2.12 with the area, or net volt-seconds, under the vL(t) curve identified.
The total area lambda is given by the areas of the two rectangles:
The average value is therefore:
What lead us to state, using equation (2), that:
Considering Figure 2.3, the output voltage v(t) of a Buck Converter is essentially equal to the DC component of the switching voltage vs(t), and equation (10) states that the output voltage v(t) is less than or equal to the input voltage Vg, since 0<D<1.
Source:
Erickson R., Maksimovic D. Fundamentals of Power Electronics. Pp. 22-24.
Examinemos más de cerca las formas de onda del inductor y el capacitor en el convertidor reductor ilustrado en la figura 2-6.
En la práctica, es imposible construir un filtro de paso bajo perfecto que elimine por completo los componentes de CA en las frecuencias de conmutación y sus armónicos. Por lo tanto, el filtro de paso bajo debe permitir que al menos una pequeña cantidad de los armónicos de alta frecuencia generados por el interruptor alcancen el voltaje de salida. En realidad, el voltaje de salida aparece como se ilustra en la Figura 2-7.
Por lo tanto, el voltaje de salida real v(t) consta del componente de CC deseado V, más un pequeño componente de CA no deseado vripple(t) que surge de la atenuación incompleta de los armónicos de conmutación por el filtro de paso bajo. Sin embargo, la magnitud de vripple(t) se ha exagerado en la figura 2-7. Casi siempre es una buena aproximación suponer que la magnitud de vripple(t) es mucho menor que el componente de CC, V:
Por lo tanto, el voltaje de salida v(t) está bien aproximado por su componente de CC, V:
Esta aproximación se conoce como Small ripple approximation (aproximación de ondulación pequeña) o la aproximación de ondulación lineal. Con esta aproximación, reemplazamos las expresiones sinusoidales amortiguadas o exponenciales para las formas de onda del inductor y el capacitor con formas de onda lineales más simples. Esta aproximación está justificada siempre que el período de conmutación sea más corto que las constantes de tiempo naturales del circuito. Además, esta aproximación debe aplicarse solo a variables continuas: la corriente del inductor y el voltaje del capacitor. No cambiar el voltaje, cambiar la corriente del voltaje del inductor. A continuación, analicemos la forma de onda de la corriente del inductor. Con el interruptor en la posición 1, el circuito se reduce a la figura 2.8a.
La tensión del inductor vL(t) viene dada por:
Aplicando la aproximación de pequeña ondulación a la ecuación (3):
La corriente del inductor se puede encontrar mediante el uso de la definición:
Dado que el voltaje del inductor es esencialmente constante durante el primer intervalo (interruptor en la posición 1), la pendiente de corriente del inductor de la ecuación (6) también es esencialmente constante y la corriente del inductor aumenta linealmente, como en la Figura 2-10, donde podemos ver vL(t) frente a iL(t):
Se aplican argumentos similares en el segundo intervalo (interruptor en la posición 2). El lado izquierdo del inductor está conectado a tierra, lo que conduce al circuito de la figura 2.8b.
El uso de la aproximación de ondulación pequeña conduce a:
así:
En consecuencia, durante el segundo intervalo, la corriente del inductor disminuye linealmente en una ecuación de pendiente constante (8), como en la figura 2-10, posición 2 del interruptor.
En la figura 2-10, la corriente del inductor iL(t) es simétrica con respecto a I. Dado que:
es el pico de ondulación (peak ripple), el pico a pico de ondulación (peak to peak ripple) es:
El pico a pico es también el cambio en la corriente, es igual a la pendiente por la longitud del primer intervalo DTs:
Solución para el pico a pico de ondulación conduce a:
Los valores típicos de la ondulación máxima se encuentran en el rango del 10 % al 20 % del valor a plena carga del componente I de CC. Por lo tanto, por diseño, la ondulación de corriente del inductor también suele ser pequeña en comparación con el componente I de CC. se justifica la aproximación:
La solución para L en la ecuación (10) produce:
La ecuación (12) se usa comúnmente para seleccionar el valor de la inductancia en el diseño del convertidor reductor. Es importante recalcar que las ecuaciones (1) a (12) se derivan de condiciones de estado estacionario.
Fuente:
Erickson R., Maksimovic D. Fundamentals of Power Electronics. Pp18-22.
Let us more closely examine the inductor and capacitor waveforms in the buck converter illustrated in Figure 2-6.
In practice, it is impossible to build a perfect low-pass filter that completely removes the AC components at the switching frequencies and its harmonics. So, the low-pass filter must allow at least some small amount of the high-frequencies harmonics generated by the switch to reach the output voltage. Actually, the output voltage appears as illustrated in Figure 2-7.
So, the actual output voltage v(t) consists of the desired DC component V, plus a small undesired AC component vripple(t) arising from the incomplete attenuation of the switching harmonics by the low-pass filter. However, the magnitude of vripple(t) has been exaggerated in Figure 2-7. It is nearly always a good approximation to assume that the magnitude of vripple(t) is much smaller than the DC component V:
Therefore, output voltage v(t) is well approximated by is DC component V:
This approximation is known as The small ripple approximation or the linear ripple approximation. With this approximation, we replace the exponential or damped sinusoidal expressions for the inductor and capacitor waveforms with simpler linear waveforms. This approximation is justified provided that the switching period is shorter than the natural time constants of the circuit. Also, this approximation must be applied just to continuous variables: the inductor current and the capacitor voltage. Not to switching voltage, switching current of inductor voltage. Next, let us analyze the inductor current waveform. With the switch in position 1, the circuit reduces to Figure 2.8a.
The inductor voltage vL(t) is given by:
Applying small ripple approximation to equation (3):
The inductor current can be found by use of the definition:
Since the inductor voltage is essentially constant during the first interval (switch in position 1), the inductor current slope of equation (6) is also essentially constant and the inductor current increase linearly, as in Figure 2-10, where we can see vL(t) vs iL(t):
Similar arguments apply in the second interval (switch in position 2). The left side of the inductor is connected to ground, leading to the circuit of Figure 2.8b.
Using the small-ripple approximation leads to:
So:
Consequently, during the second interval the inductor current decrease linearly at a constant slope equation (8), as in Figure 2-10 position 2 of the switch.
In Figure 2-10 the inductor current iL(t) is symmetrical about I. Since:
is the peak ripple, the peak to peak ripple is:
Which is also the change in current . It is equal to the slope times the length of the first interval DTs:
Solution for the peak ripple yields:
Typical values of the peak ripple lie in the range of 10%-20% of the full-load value of the DC componentI. So, by design, the inductor current ripple is also usually small compared to the DC component I. The small approximation is justified:
Solution for L in equation (10) yields:
Equation (12) is commonly used to select the value of the inductance at the design of the buck converter. Equations (1) to (12) are derived from steady-state conditions. Source:
Erickson R., Maksimovic D. Fundamentals of Power Electronics. Pp18-22.
The buck converter has been built to reduce the DC voltage, using only nondissipative switches, inductor and capacitors. The switch produces rectangular waveform vs(t) as illustrated in Figure 2-1.
In practice, the switch is realized using power semiconductor devices, such as transistors and diodes, which are controlled to turn off and on as required to perform the function of the ideal switch. The switching frequency fs is in the range of 1KHz – 1MHz, depending on the switching speed of the semiconductor devices. The duty ratio D is the fraction of time that the switch spends in position 1, and is a number between zero and one. The complement of the duty ratio, D’, is defined as (1- D). As we know from Fourier Transform, the DC component of a periodic function as vs(t), is given by its average value <vs(t)>:
Solving equation (1) we obtain the following solution as illustrated in Figure 2-2:
Equation (2) confirms that the DC component of the voltage output vs(t) of the buck converter is equal to or lower than the input voltage vg. In the practice, vs(t) is not ideal, so it has harmonic components. In consequence, the converter has to have a filter integrated on it. What remains is to insert a low-pass filter as illustrated in Figure 2-3:
The filter is designed to pass the DC component of vs(t), but to reject its components at the switching frequency and its harmonics. To accomplish this, we design the filter such that its cutoff frequency is much lower than the switching frequency. So, the output v(t) voltage from Figure 2-3, is essentially equal to the DC component of vs(t):
The network of Figure 2-3 allows control of the output. Figure 2-4 is the control characteristic of the buck converter:
So, the buck converter has a linear control characteristic. Feedback systems are often constructed that adjust the duty ratio D to regulate the converter output voltage, such as in Figure 1.11:
Simulation with Matlab-Simulink
Source:
Erickson R., Maksimovic D. Fundamentals of Power Electronics.Pp15-18.
La linéarité est l’une des propriétés les plus importantes des systèmes. Ce cours en ligne se compose de trois vidéos à partir desquelles vous apprendrez à analyser la propriété de linéarité et à vérifier qu’un système est linéaire ou non. Il vous propose une théorie et des méthodes équivalentes aux cours Signaux et Systèmes en Ingénierie. La propriété de linéarité est vérifiée pas à pas dans ces 5 systèmes à temps continu et/ou discret présentés ci-dessous:
Linearität ist eine der wichtigsten Eigenschaften von Systemen. Dieser Online-Kurs besteht aus drei Videos, in denen Sie lernen, die Linearitätseigenschaft zu analysieren und zu überprüfen, ob ein System linear ist oder nicht. Es bietet Ihnen Theorie und Methoden, die den Signals and Systems-Klassen in den Ingenieurwissenschaften entsprechen. Die Eigenschaft der Linearität wird Schritt für Schritt in diesen 5 unten gezeigten kontinuierlichen und/oder diskreten Zeitsystemen verifiziert:
Linearity is one of the most important properties of systems.
Linearity is one of the most important properties of systems. This Online course consists of three videos from which you will learn to analyze the linearity property and check that a system is Linear, or otherwise, that it is not. It offers you theory and methods that are equivalent to the Signals and Systems classes in Engineering. The property of linearity is verified step by step in these 5 continuous and/or discrete time systems shown below: