

«Electromechanical Systems are those hybrid systems of mechanical and electrical variables.» Applications for electromechanical components cover a broad spectrum, from control systems for robots and star-trackers, to household appliances and hard disk position controls on a computer, or the control of DC motors in air conditioning systems for residential installations.

- Detail of copper winding, stack and shaft of a electric permeant magnet motor for home appliances.
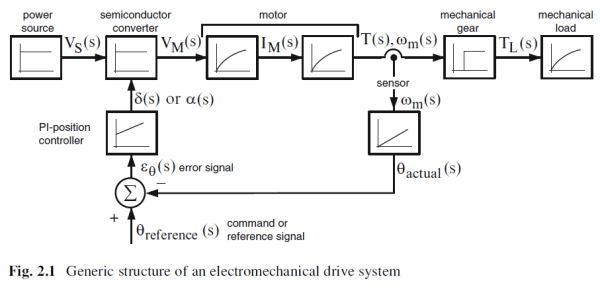
Figure 2.1 shows an electromechanical drive system. It consists of a power and energy source, a gate circuit for the converter, electronic converters (rectifier, inverter, electronic power controller), current sensors (shunts, current transformer, Hall sensor), voltage sensor (divider voltage, potential transformer), speed sensors (tachometers) and displacement sensors (encoders), three-phase rotary machines, gearboxes and specific loads (pump, fan, car, etc.). In Figure 2-1 all components, with the exception of gears, are represented by a Transfer Function (output variables as a function of time), while the gearbox is represented by a Characteristic Function (Xout output variable depending on the input variable Xin)
The electric machine is perhaps the best example of an electromechanical device because of the frequency with which it is used in numerous applications of daily life. An electric machine is a device that can convert mechanical energy into electrical energy (a hydroelectric plant, for example), or convert electrical energy into mechanical energy (a motor).
For the study of electromechanical systems from the point of view of control engineering, we have decided to focus our attention on DC motors, especially armature-controlled DC servo motors, as they are components intensively used in emerging industries that combine electromechanical engineering with Telematics, as is the case with Robotics and Drones technology. And because, precisely, these areas, together with that of electric vehicles and industry 4.0, are initiating a paradigm shift in all areas of life.

We are dedicated to developing the mathematical model of an electromechanical system with DC motor, as well as the characteristics of this system when it is part of an open loop or closed loop control system (Servomotors). We also provide numerous examples of how to determine and use the Transfer Function of an electromechanical system to analyze its stability and its response over time (transient and steady state).
And gradually we will cover these industries more specifically, with great potential for innovation and future labor demand.
NEXT:
- Open-Loop Control System – Electromechanical case
- Block diagram of Electromechanical System
- Solved Example 1- Electromechanical system transfer function
Sources:
- Control Systems Engineering, Nise
- Sistemas de Control Automatico Benjamin C Kuo
- Modern_Control_Engineering, Ogata 4t
- Libro Rashid – Power Electronic Handbook p 663-666
- Getty Images
Literature review by:
Prof. Larry Francis Obando – Technical Specialist – Educational Content Writer
WhatsApp: +34633129287
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, UCV CCs
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contacto: España. +34633129287
Caracas, Quito, Guayaquil, Cuenca.
WhatsApp: +34633129287 +593998524011
FACEBOOK: DademuchConnection
email: dademuchconnection@gmail.com


















 Dónde:
Dónde:

 Entonces:
Entonces:
 Si la señal de excitación x(t) es una señal armónica, del tipo:
Si la señal de excitación x(t) es una señal armónica, del tipo: Entonces:
Entonces:
























 Ecuación 2:
Ecuación 2:

 De tal manera que:
De tal manera que:
 De donde:
De donde:












 Luego:
Luego: Por lo que:
Por lo que: En definitiva:
En definitiva:





